Toujours été attiré par les hyper. Je décide donc, de réaliser une station 10 GHz.
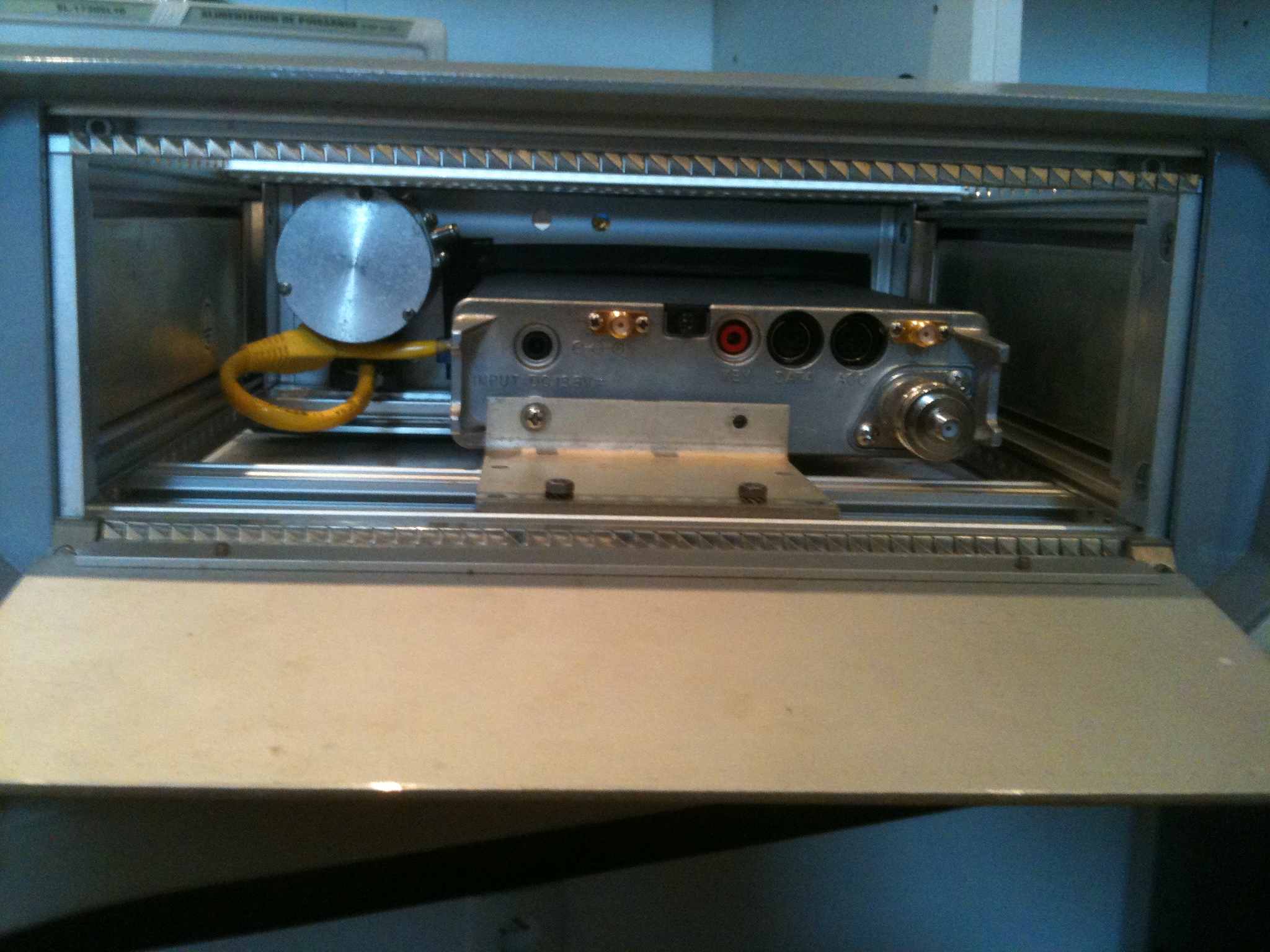
En premier la parabole, son support, l’adaptation au trépied. Le plus compliqué a été de réaliser la plaque en alu avec deux coté chanfreinés pour qu’elle soit verrouillés par le système de fixation du pied. Une équerre réalisée en profilé permet la jonction de celle-ci avec la plaque fixée à l’arrière de la parabole (découpée en son centre pour le passage du guide). Puis la récupération d’une alimentation HP en panne (merci F6DPH) que j’ai dépouillé pour ne garder que le coffret qui me sert de base pour y mettre l’hyper (relais guide, le PA, le LNA, le Transverter et l’ocxo 10 MHz en cas de « panne » du GPS). Ce sera ma box 10 GHz. Petit must je vais utiliser un guide souple pour relier l’antenne à la 10 GHz box, j’installes une fixation guide rapide à une extrémité du guide souple pour le connecter à la parabole et l’autre sur la sortie de la 10 GHz box sur la sortie guide sortant du relais en guide WR90.


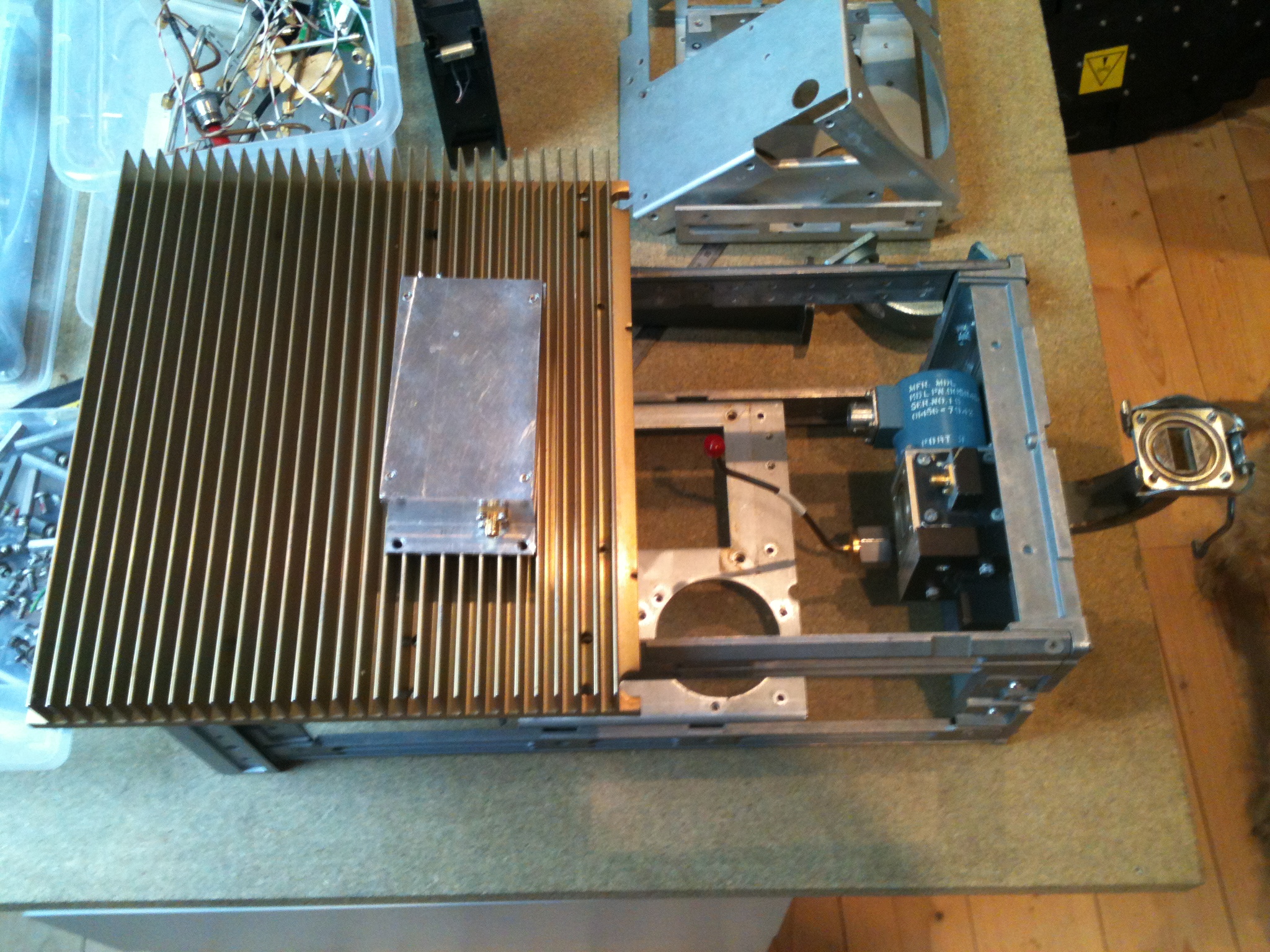
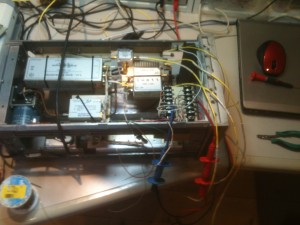
Découpe et positionnement du radiateur recevant le PA 10 GHz.


Il va falloir ruser pour faire rentrer le radiateur dans le coffret….. Le PA 10 GHz semble tout petit (mais costaud dixit F6CIS)… Je sens que la fraiseuse va être mise à contribution.


Bon OK, attaquer le radiateur à la disqueuse mais après un peu d’effort ça rentre. Bon maintenant une combine pour le fixer avec le ventilateur qui va bien.
Positionnement des transitions WR90/SMA sur le relais guide et test de commande du guide. Bien sur il est en 24V à impulsion, et je n’ai que du 12V pour l’alimenter. De plus, la commande en sortie du transverter est un état +12V pour le passage en émission et un 0V pour le passage en réception.
Un merci à F5BQP, j’utilise un petit buck 12V vers 24V, un convertisseur latching W6PQL.


OK j’ai du modifié le latching car il était monté en positif et le temps de commutation un peu court car mon switch en guide fait en fait trois fois 30° successifs pour faire les 90° !!!!! Un système Galettes et diodes permet de tourner toujours dans le même sens.
Le câblage est chiant car il y a pas un CI ou un module qui fait les mêmes dimensions. Vives les hyper.

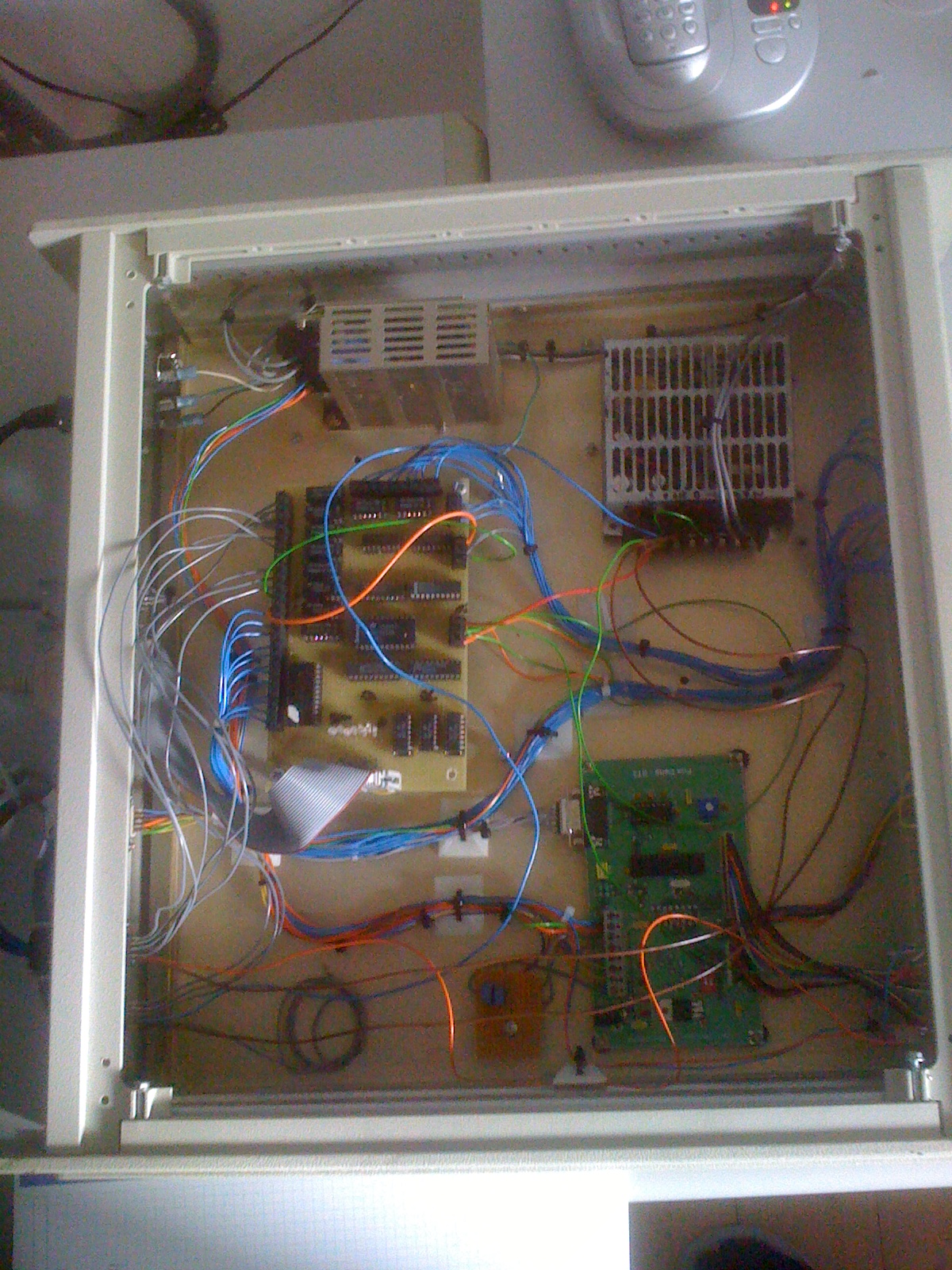
Bon, j’ai tout (presque) rentré dedans, le radiateur retaillé, le PA 10 GHz dessus, le transverter, le LNA, la carte latching et le convertisseur 12V pour commander le relais guide, il n’est alimenté que pour la commutation de celui-ci. Cela limitera les bruits dus aux alimentations (du moins en réception). J’en ai profité pour tester le RL de la sortie PA en passant par le relais guide (comprenant les adaptateurs guide coaxial) WR90 je suis un peu mieux que 32 dB. On fera avec. J’en profites pour rajouter un OL 10 MHz, un inverseur pour recevoir un 10 MHz externe (GPS), un coupleur pour envoyer le 10 MHz au transverter et à la 817 Box… Heureusement le relais est en 12 Volts.
 Bon retour à la parabole. Philipe F6BTP a réalisé une transition WR75 en WR90. Je trouves 32 dB de RL avec la charge étalon HP… Pas mal du tout, voilà qui est de bonne augure. Je la colle à la source de la parabole, je suis à 30 dB. Logique on empile…. J’essaye de connecter le guide avec le raccord rapide rien à faire. La transition côté WR90 est massive. Je lui passe un coup de fraiseuse de chaque côté (du petit côté) et après moult travail et 4 mm de matière retirée. Il est dur l’alu de F8BTP…. c’est OK Je peux relier le guide souple avec sa fixation rapide. Je perces tous les trous à 4.2 mm pour être dans les normes USA.
Bon retour à la parabole. Philipe F6BTP a réalisé une transition WR75 en WR90. Je trouves 32 dB de RL avec la charge étalon HP… Pas mal du tout, voilà qui est de bonne augure. Je la colle à la source de la parabole, je suis à 30 dB. Logique on empile…. J’essaye de connecter le guide avec le raccord rapide rien à faire. La transition côté WR90 est massive. Je lui passe un coup de fraiseuse de chaque côté (du petit côté) et après moult travail et 4 mm de matière retirée. Il est dur l’alu de F8BTP…. c’est OK Je peux relier le guide souple avec sa fixation rapide. Je perces tous les trous à 4.2 mm pour être dans les normes USA.
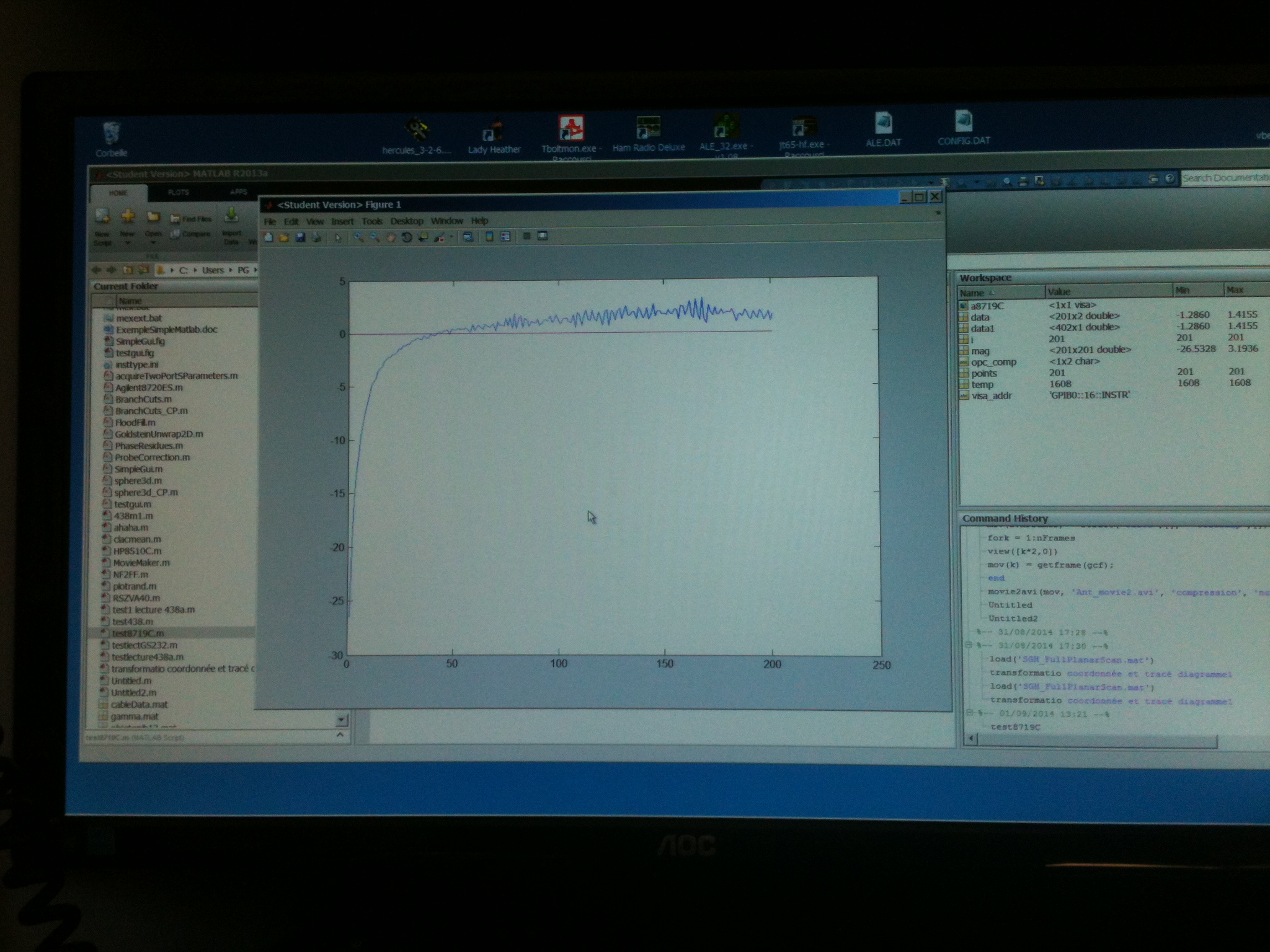
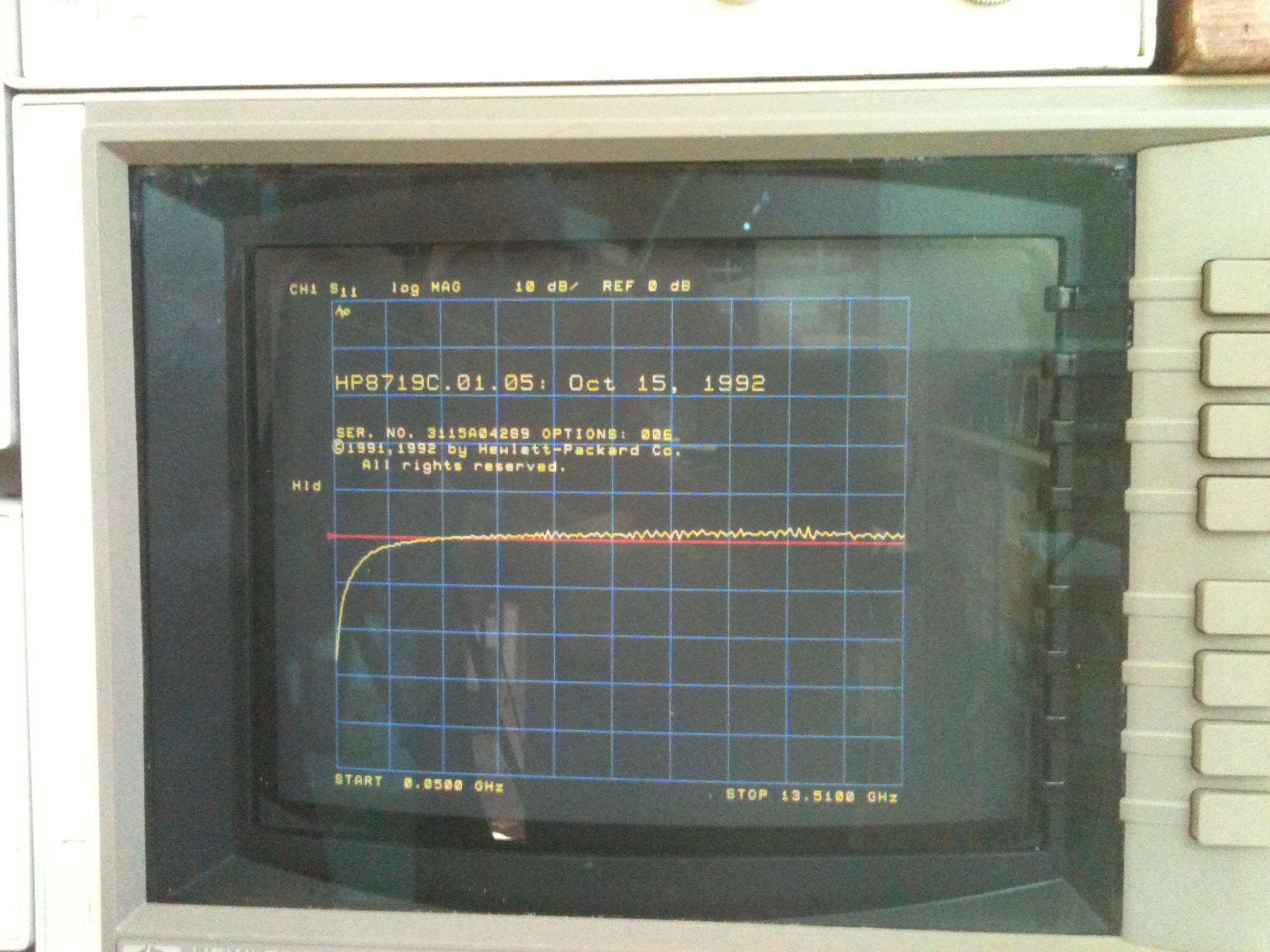
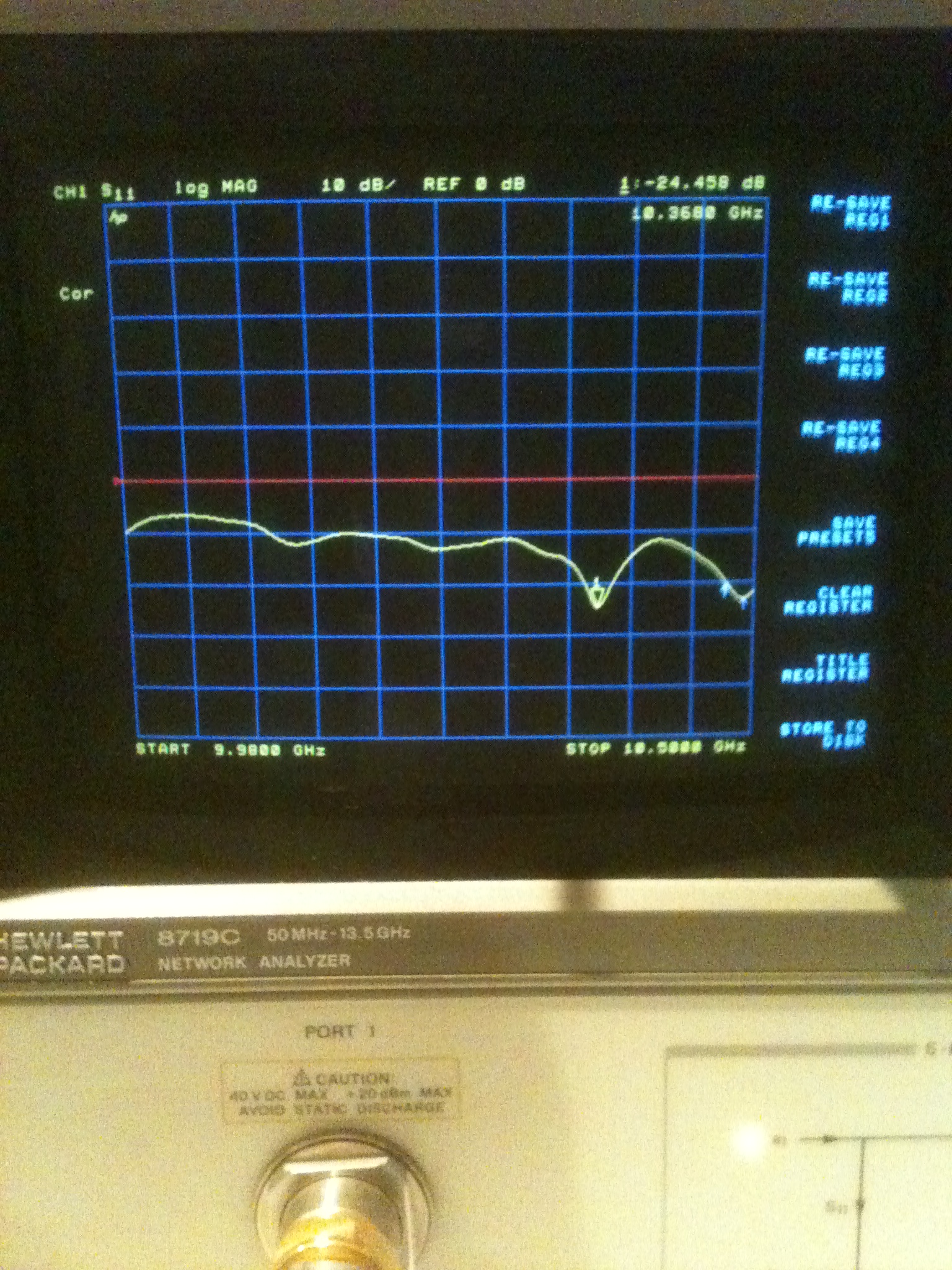
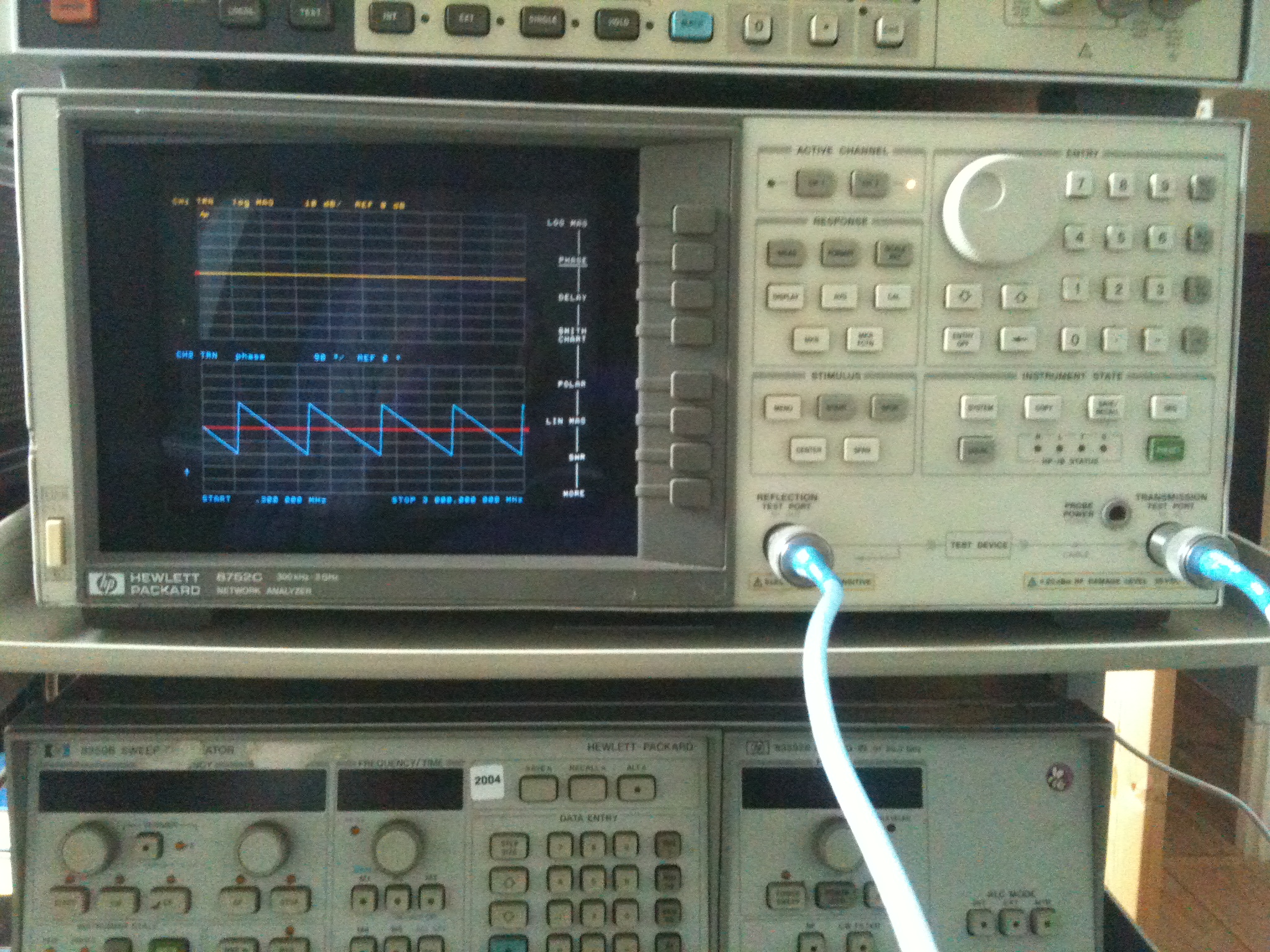
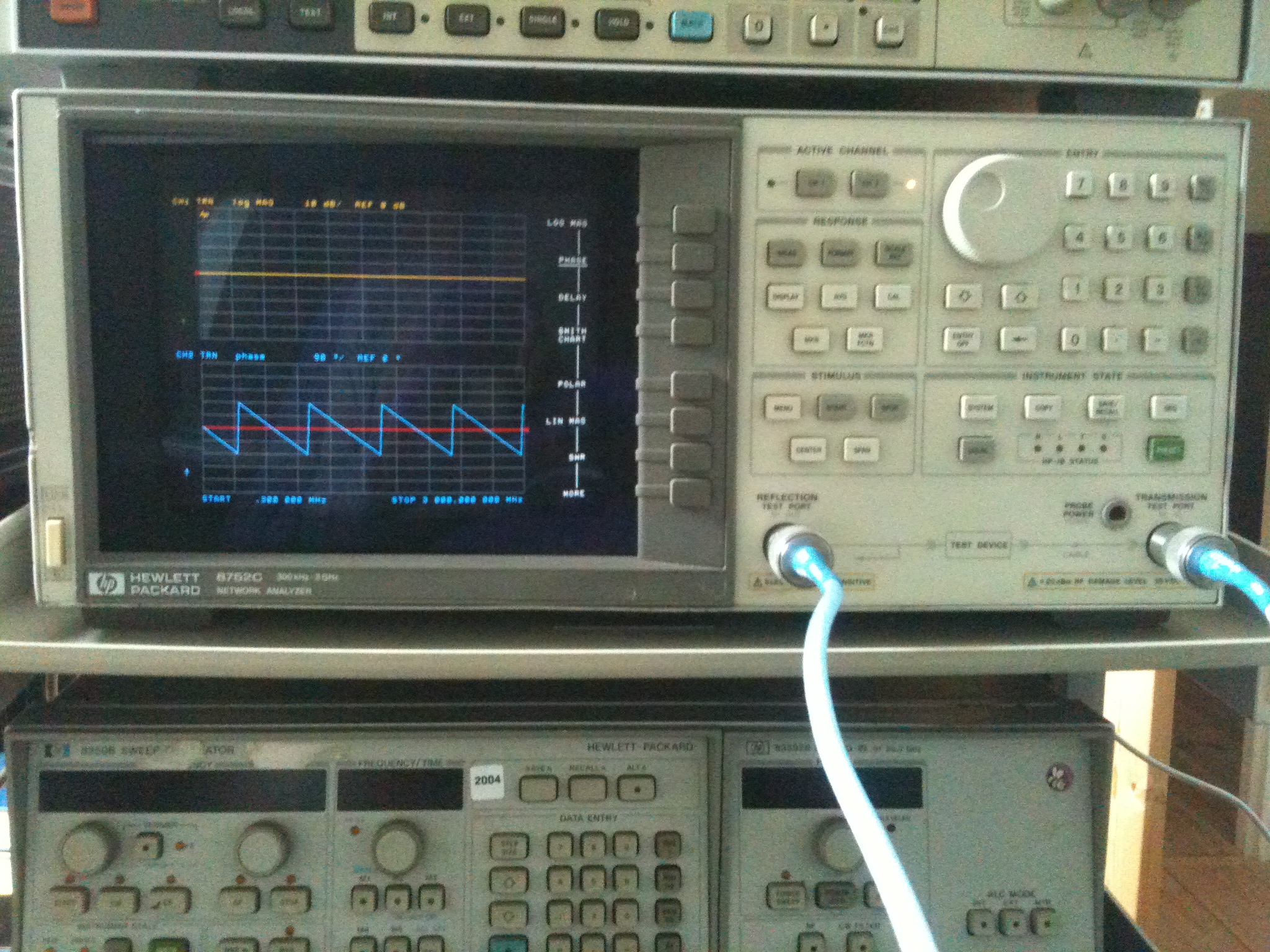
Bon c’est l’instant de vérité, il faut que je testes la parabole, son feed, la transition WR75 en WR90, le guide souple au VNA pour SAVOIR….
Allez je raccordes le tout, un coup de calibration du VNA, puis tests.
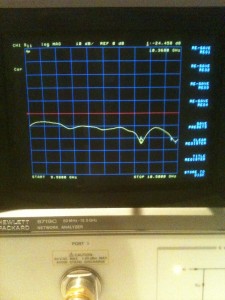 Bon pratiquement 25 dB de RL, vus les conditions et tout ce qu’il y a devant la parabole…..
Bon pratiquement 25 dB de RL, vus les conditions et tout ce qu’il y a devant la parabole…..

Maintenant faut que je trouves un bornier qui va bien pour l’installer dans la 10 GHz box afin de finir le câblage.

Bon, ça avance la commande via le FT817/Box se fait bien. Par contre le SEQ2 de DB6NT est trop juste. Il est prévus pour 4/8 ampères et là je consomme 10… F6CIS me fait parvenir un DEQ3. Merci à lui. Maintenant c’est OK. L’esprit OM existe encore. En attendant je testes le 10 MHz interne ou externe avec sa sélection par relais avec un coupleur 2 voies (MiniCircuit). C’est OK, soit j’utilise l’OCXO interne (Oscillatek 356) soit un 10 MHz externe venant du GPS. Je vais même recâbler la face avant de cette alimentation pour y mettre l’entrée 10 MHz externe (GPS), les prises alimentations ainsi que l’inter de sélection du choix du 10 MHz. Sans oublier la commande PTT venant de la box/817! Pour faire câbles au plus simple je mets la sortie 144 MHz et le 10 MHz qui vont à la Box/817 sur la face arrière.
Comme il y a deux galvanomètres, un va me servir à mesurer le monitoring du transverter, et l’autre de l’ampli final. Ajustement résistances obligent entre la consommation du galva et ce que débite la sortie minotoring.. Tiens dans la foulée je vais mettre des LED indiquant l’état du commutateur guide. Pu… c’est bien de commander sur la baie mais 3 semaines de délai pour 3 embases femelle/femelles SMA à monter sur le face avant. Je suis obligé en attendant de sortir les câbles SMA par les trous de la face avant….

Quelle galère de vouloir utiliser les galvas d’origine pour visualiser les tensions monitoring de l’ampli 1 Watt et du « 10W ». Je mets « » car il devrait sortir 10 W mais n’en sort que 5…
Bon j’ai reçus mes prises je vais en profiter pour finir.
Et voila !! La box/817 terminée et connectée à la box/10 GHz. Le voyant vert indique bien que le commutateur guide WR90 est bien en position RX et quand j’appuie sur la pédale du micro…
Miracle la verte s’éteint, la rouge s’allume et je monitoring mes PA…
Demain sera un autre jour faut je relie à la parabole et fasse le support qui va bien. Encore une journée pour de la mécanique…


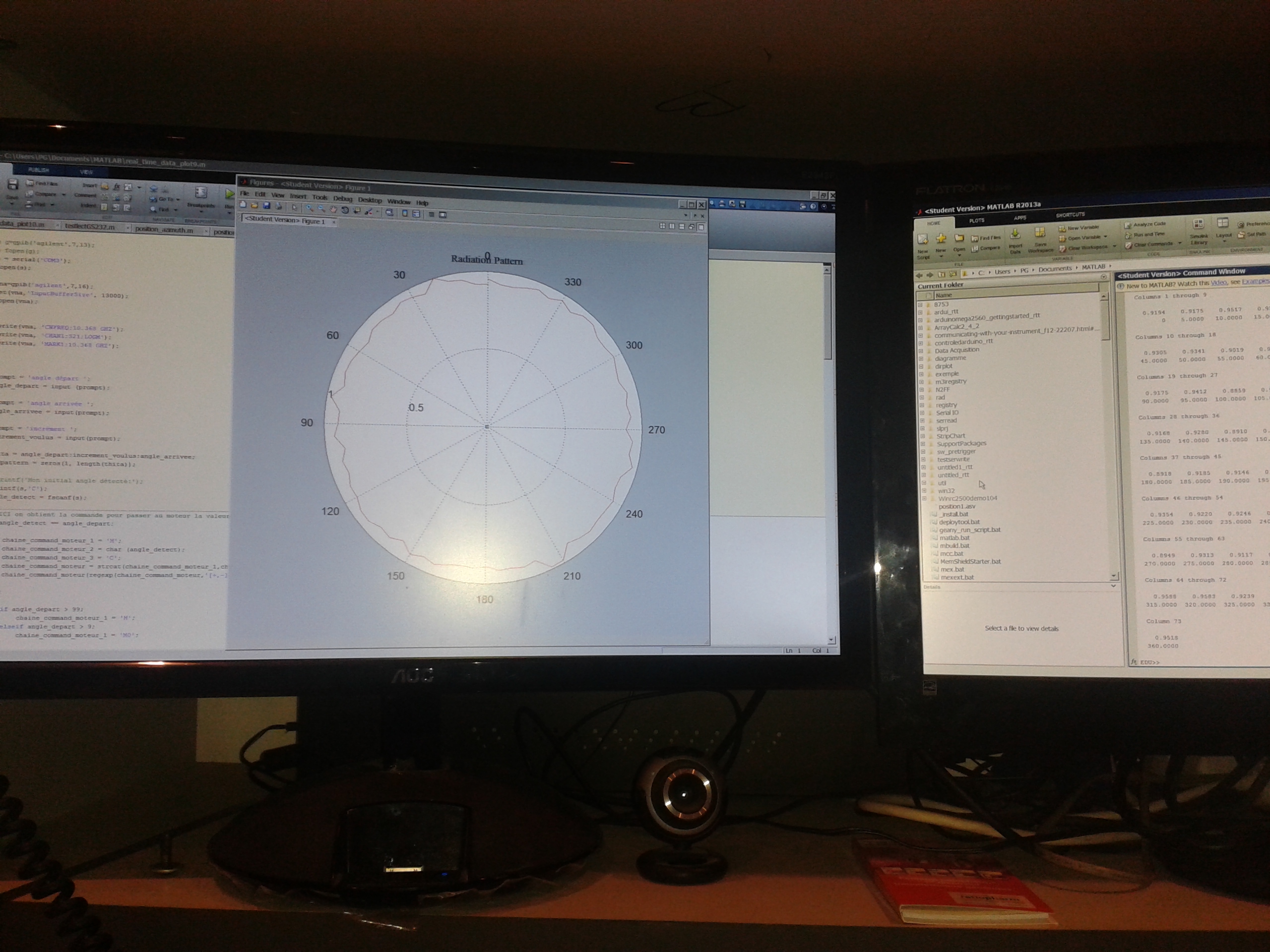
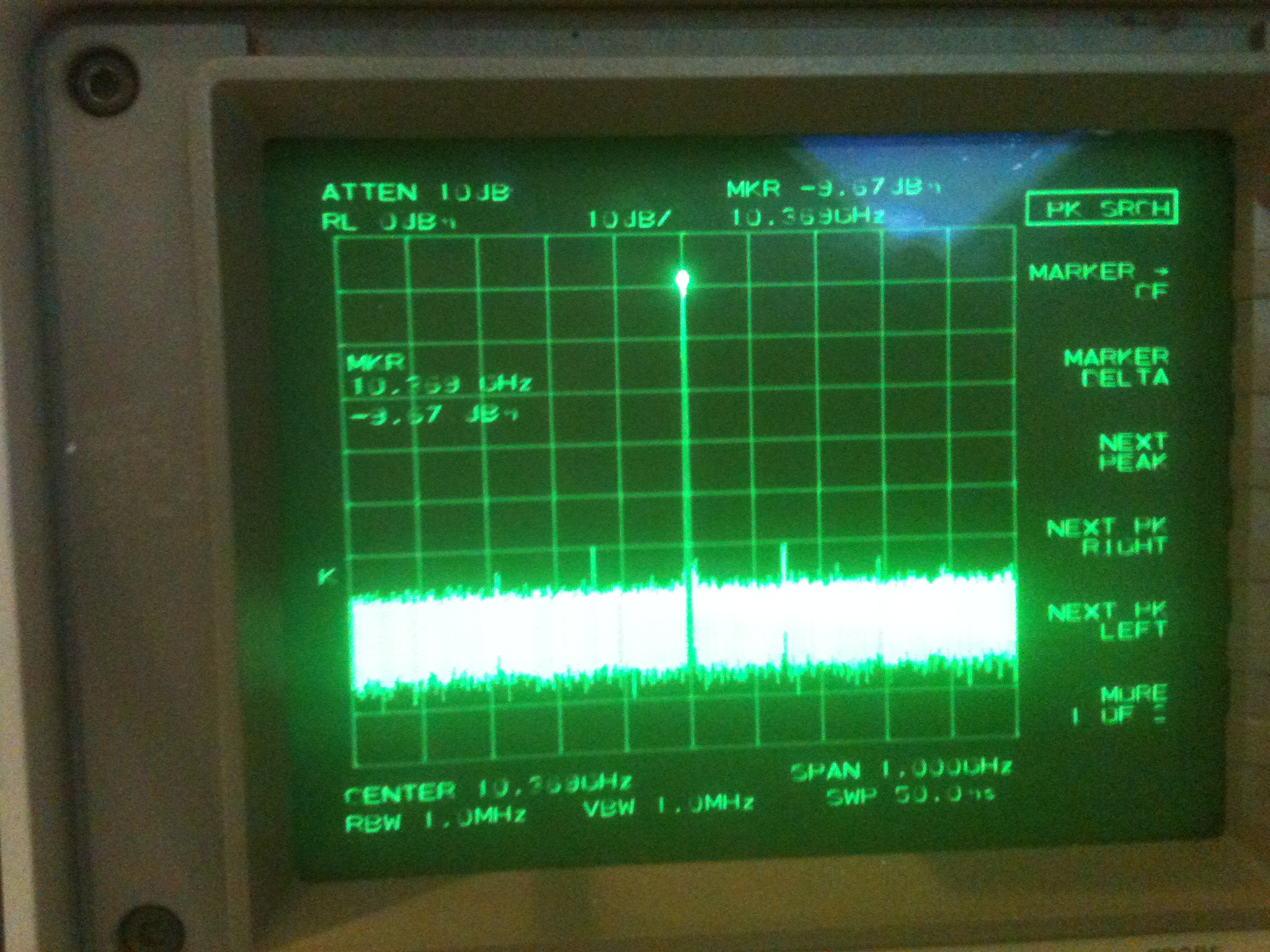
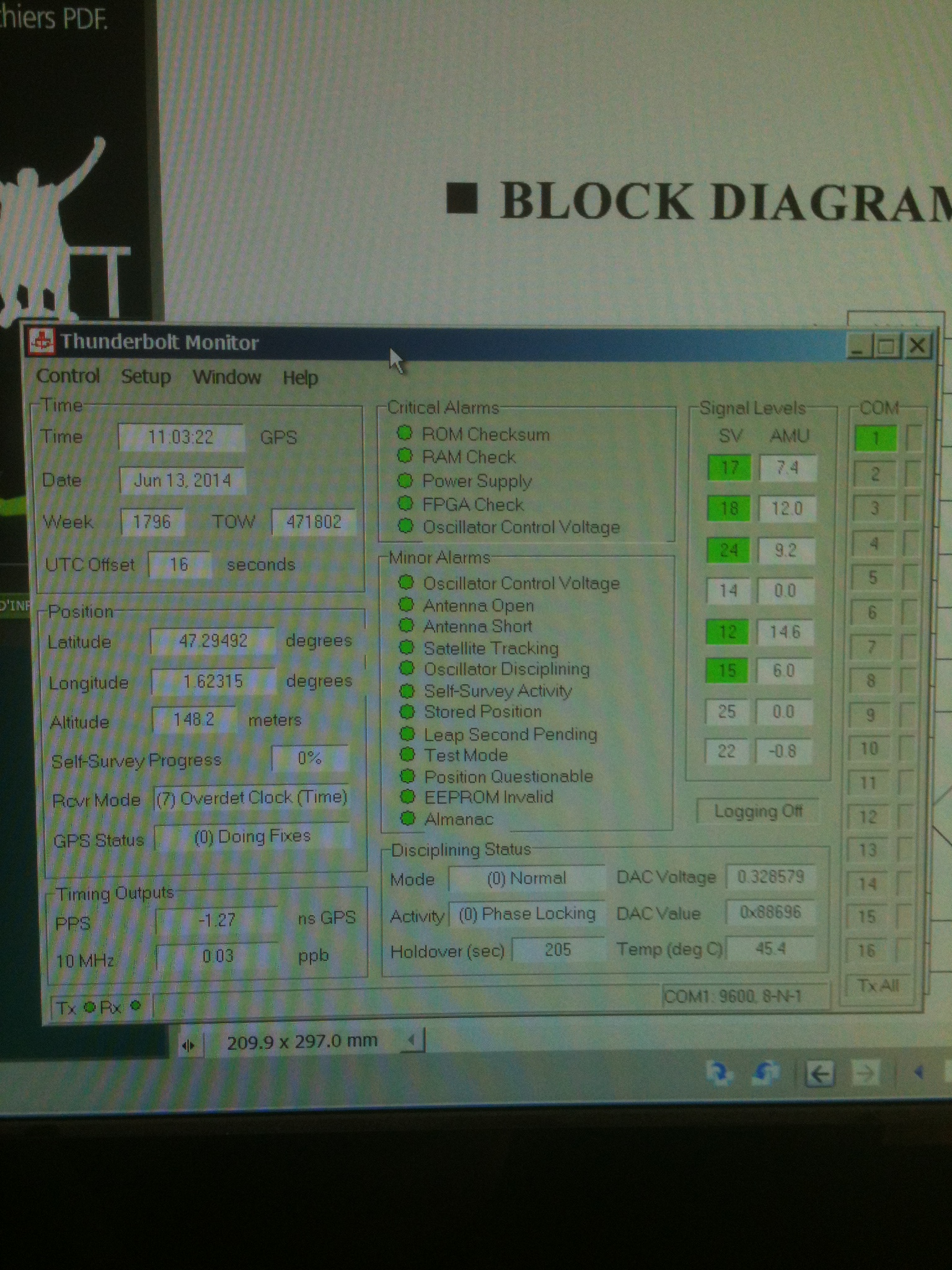
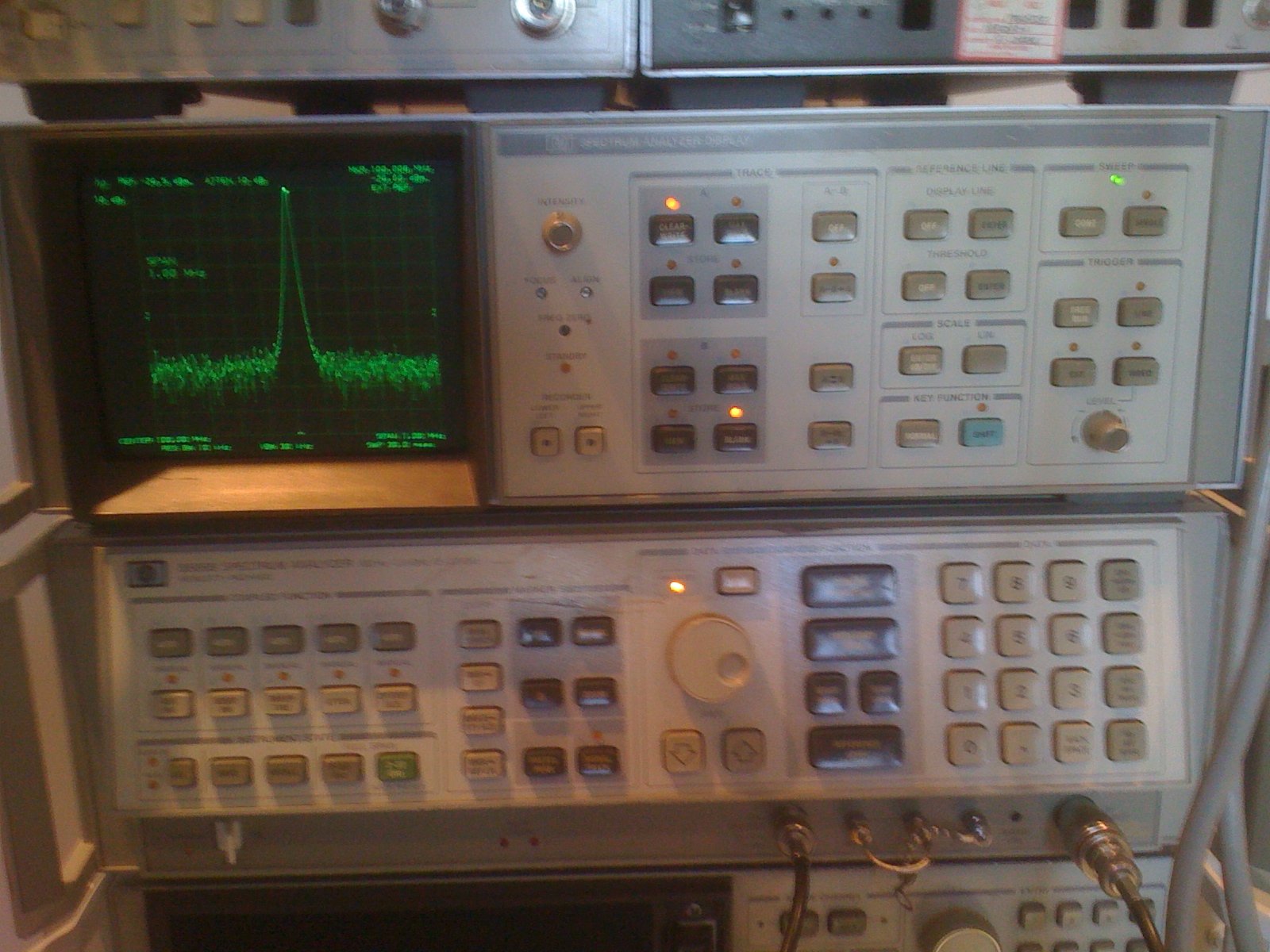
Bon, j’ai relié la parabole, envoyé du jus via le VNA et une parabole, la box/817 va bien et le PC me donne bien la raie spectrale……
J’ai via la 817/box envoyé du jus, ça va la raie spectrale sur l’analyseur de spectre HP 8563E est cool. Faux que je me mettes au boulot pour faire un montage supportant la box/10GHz et la box/817 car en portable je n’aurai pas de table à roulette. Et, il faut qu’il soit démontable pour que la parabole et son support rentre dans la voiture… En plus faut que je potasses les mesures de ciel/sol. Jamais fait et pour moi c’est comme le temps ici assez dans le brouillard.

Pour le support, Jai trouvé une combine… Un cadre amovible permet de supporter la Box/817 et la Box/10GHz. Des équerres et des pieds (fait avec des colonnettes les pieds…) évitent que la Box/10 GHz sorte du berceau.
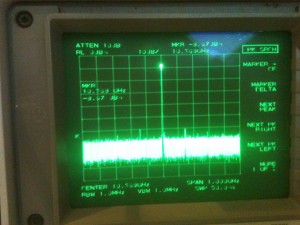
Bon test et j’emmènes tout dehors. Par la fenêtre je demande au synthé d’envoyer via une parabole de 40 cm du 10.368 GHz. J’installes le tout et miracle des hyper j’ai bien une porteuse en 144 MHz. Pour le fun un bout de fil sur une N reliée au HP 8563E me montre que quand je passe en émission je suis OK. Me reste à régler le problème d’alimentation.. Une alimentation à découpage sur le bord de la route en pleine campagne ça va pas le faire…





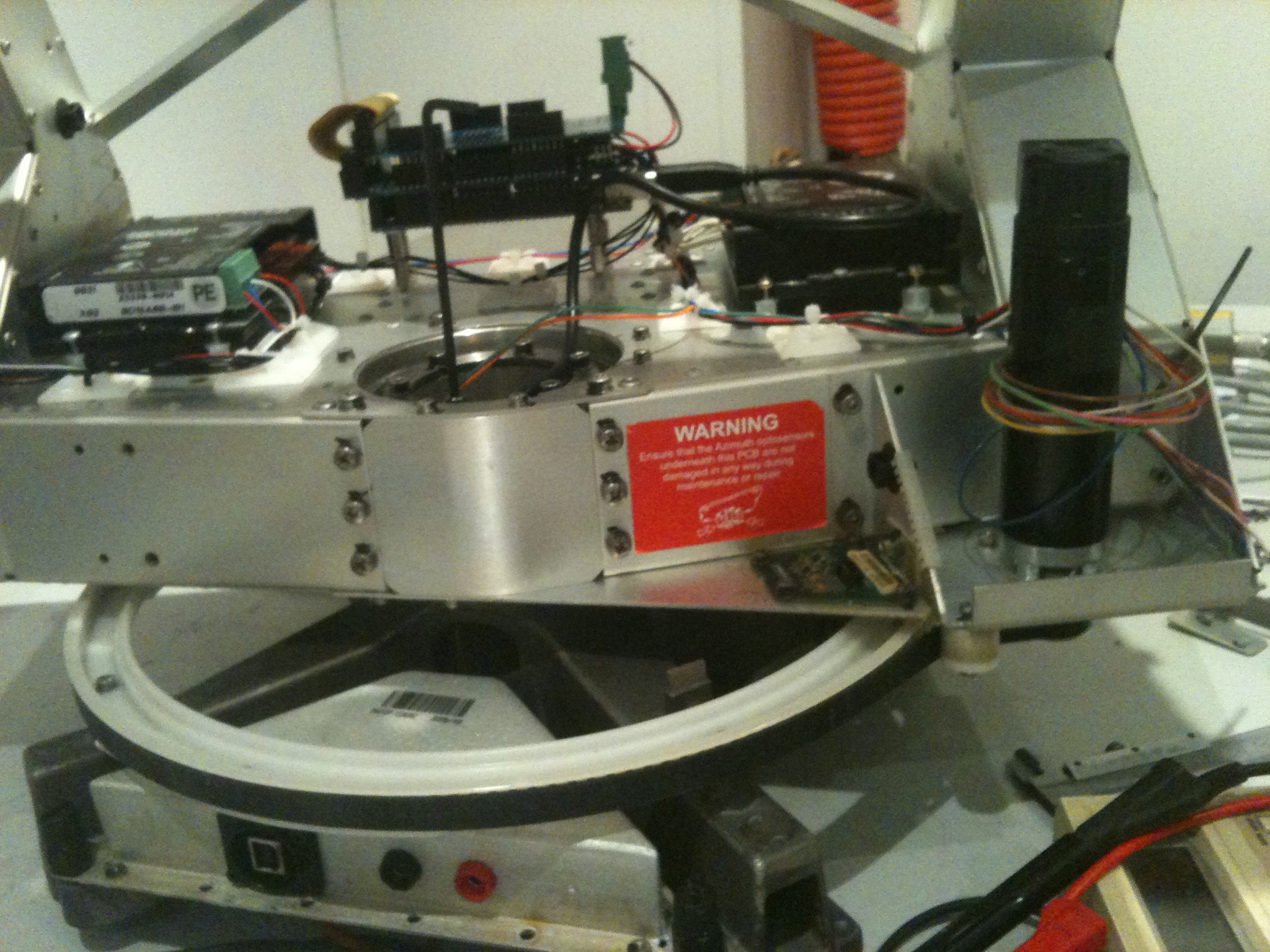
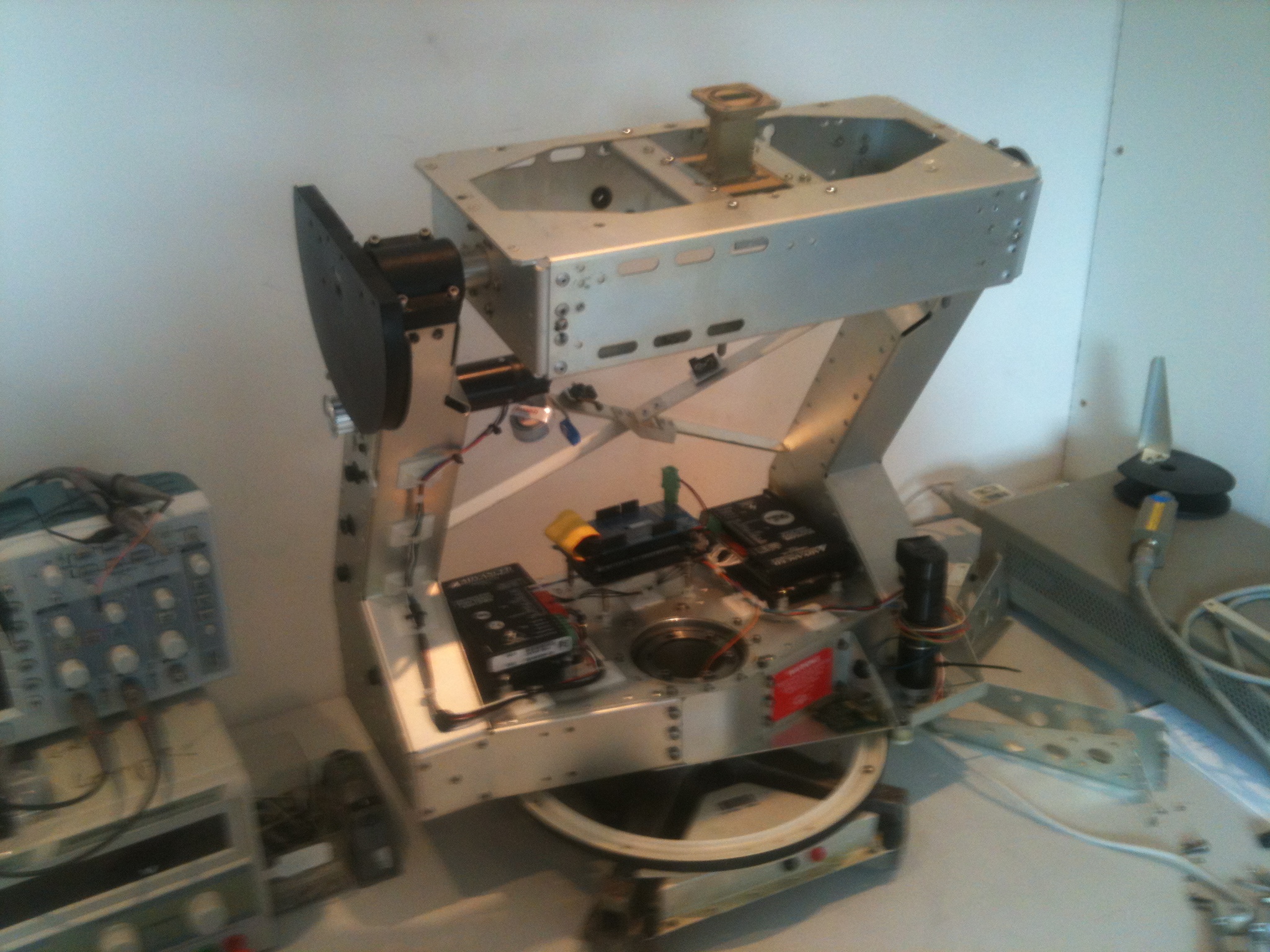
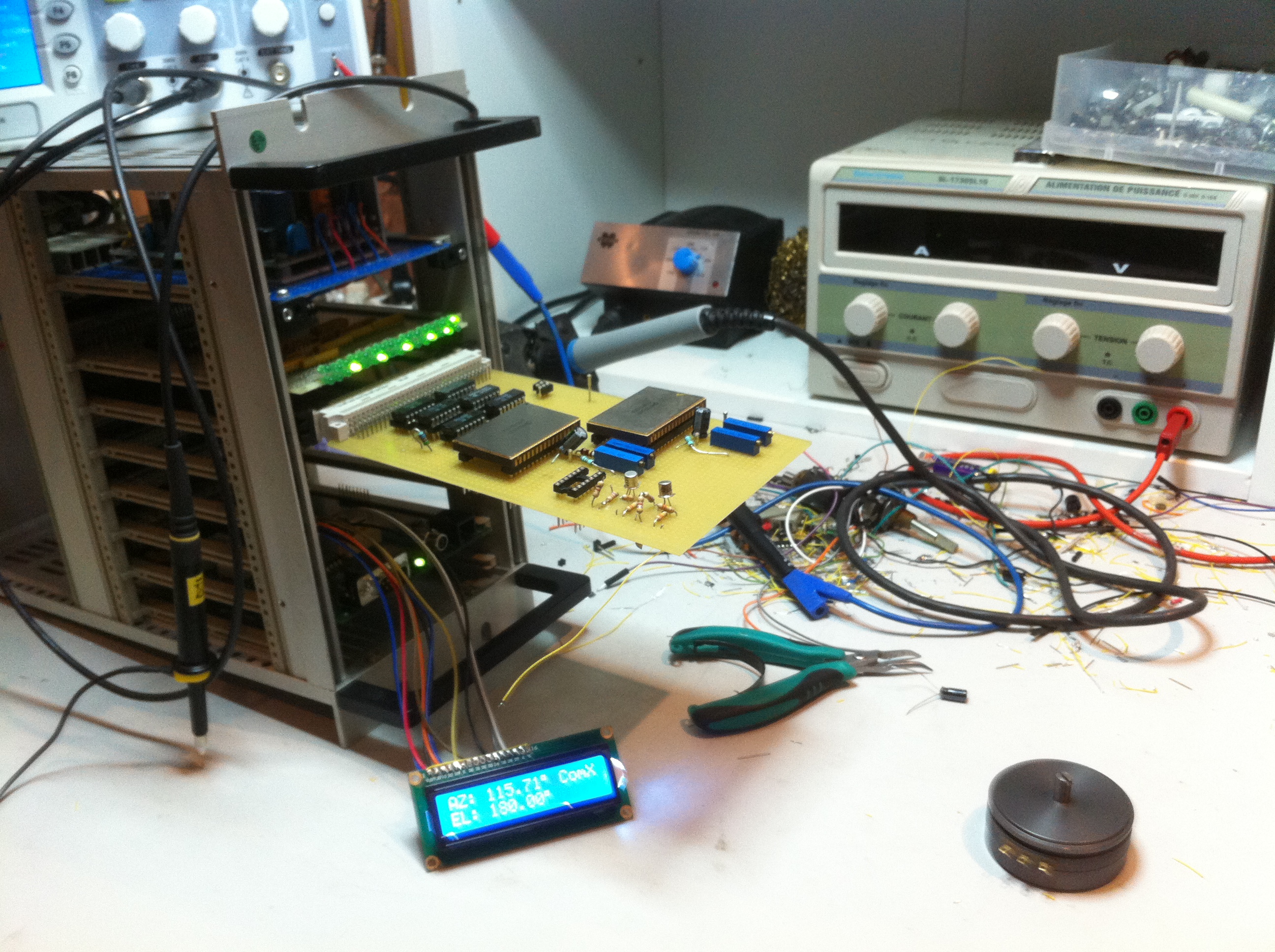
 L’axe AZ est démonté, nettoyé maintenant câblage… Je remets le boitier synchros afin de me servir de celui-ci pour fixer le « codeur ».
L’axe AZ est démonté, nettoyé maintenant câblage… Je remets le boitier synchros afin de me servir de celui-ci pour fixer le « codeur ».