Bon après avoir critiqué pendant 40 ans les informaticiens, je m’y mets. Pas le choix aujourd’hui, dans nos bidouilles il faut connaitre du soft. Quelle galère pour moi qui y suis particulièrement réfractaire. Il a fallut que maintenant seulement je fasses la différence entre une variable globale et une variable locale.
Je vais y mettre Arduino, Matlab etc…..
Il faut que je fasses du C pour l’Arduino, du Matlab pour MATLAB ( on dirait du Fortran…) et du script Python. La galère je vous dit, la galère.
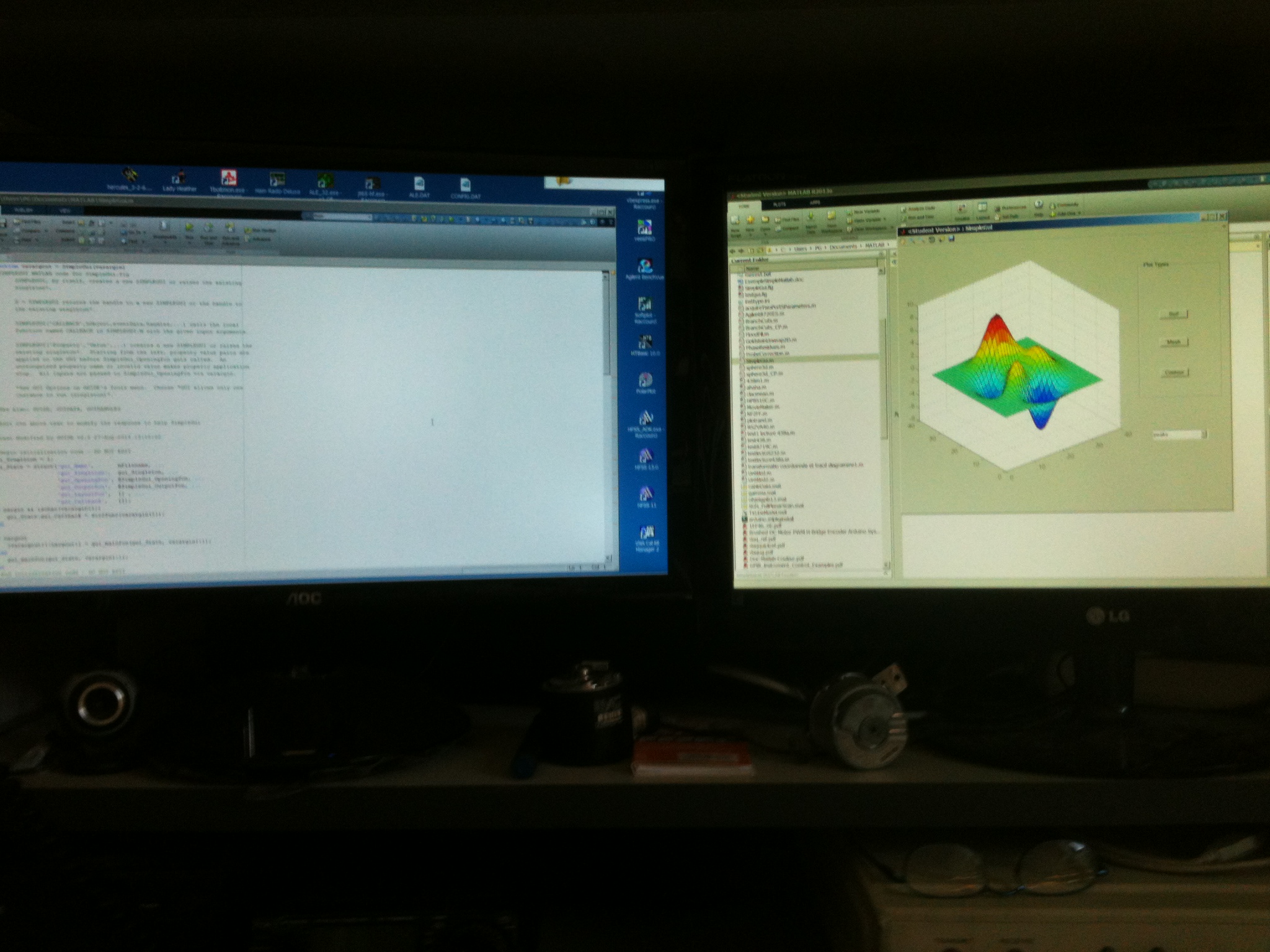
Exemple de réalisation d’une fenêtre graphique en utilisant GUIDE de MATLAB.
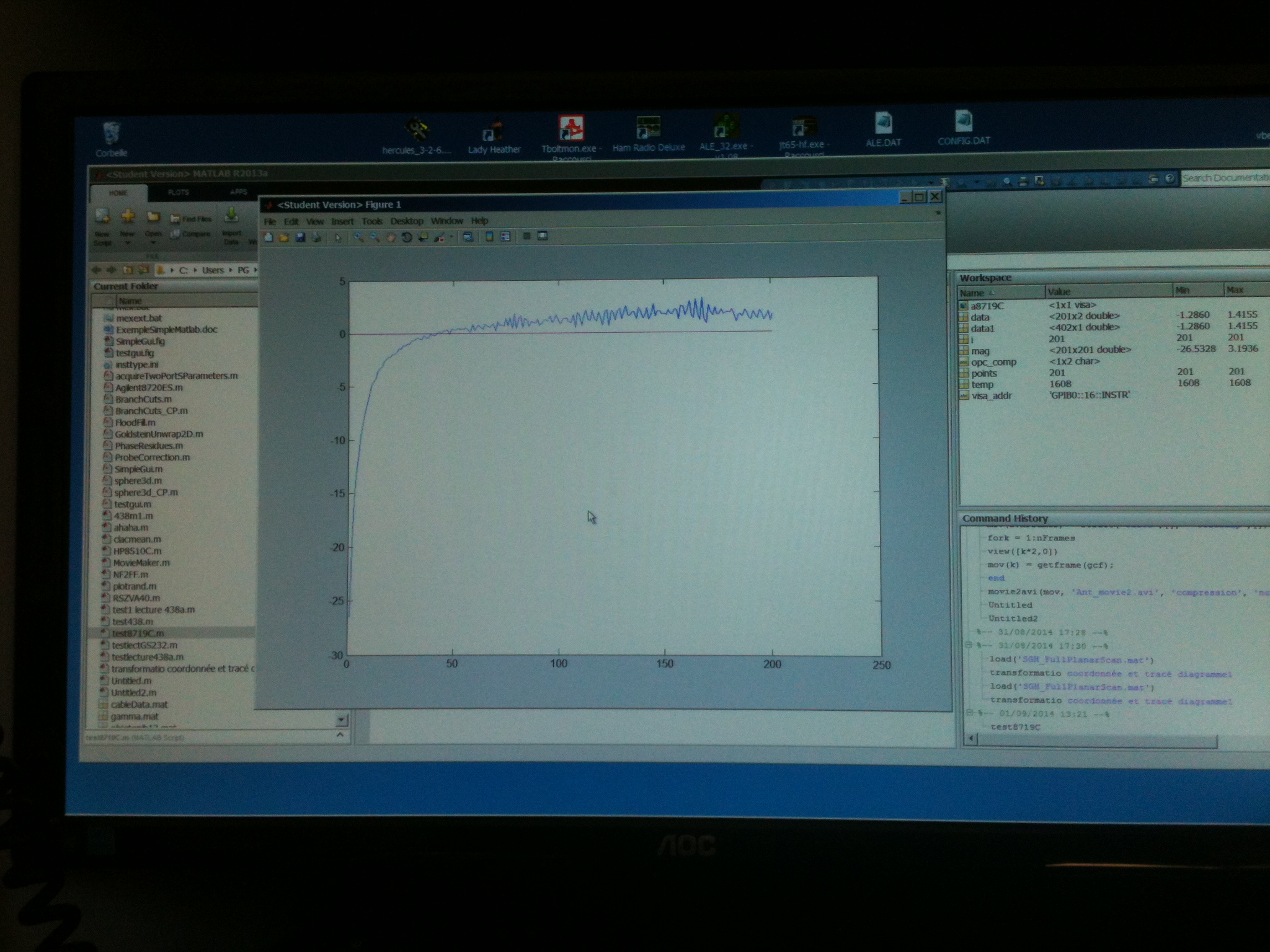
Exemple de tracé graphique sous MATLAB, sans l’utilisation de GUIDE, je faits l’acquisition et pilotage du VNA via GPIB avec le logiciel et je trace une fenêtre graphique des données récupérées. Je peux même le compiler et en faire un exécutable indépendant de MATLAB et le faire tourner sous WINDOW…
Bon maintenant, il faut faire une fenêtre de saisie gérant le port COM afin de lire et commande la carte ARDUINO qui elle, pilotera le positionneur Azimuth Elevation (en attendant une carte F1EHN).
Pour le moment je sais récupérer les valeurs de mon affichage de position Azimuth Elevation (celui-ci est au protocole GS232 sandard !!!!!!!!

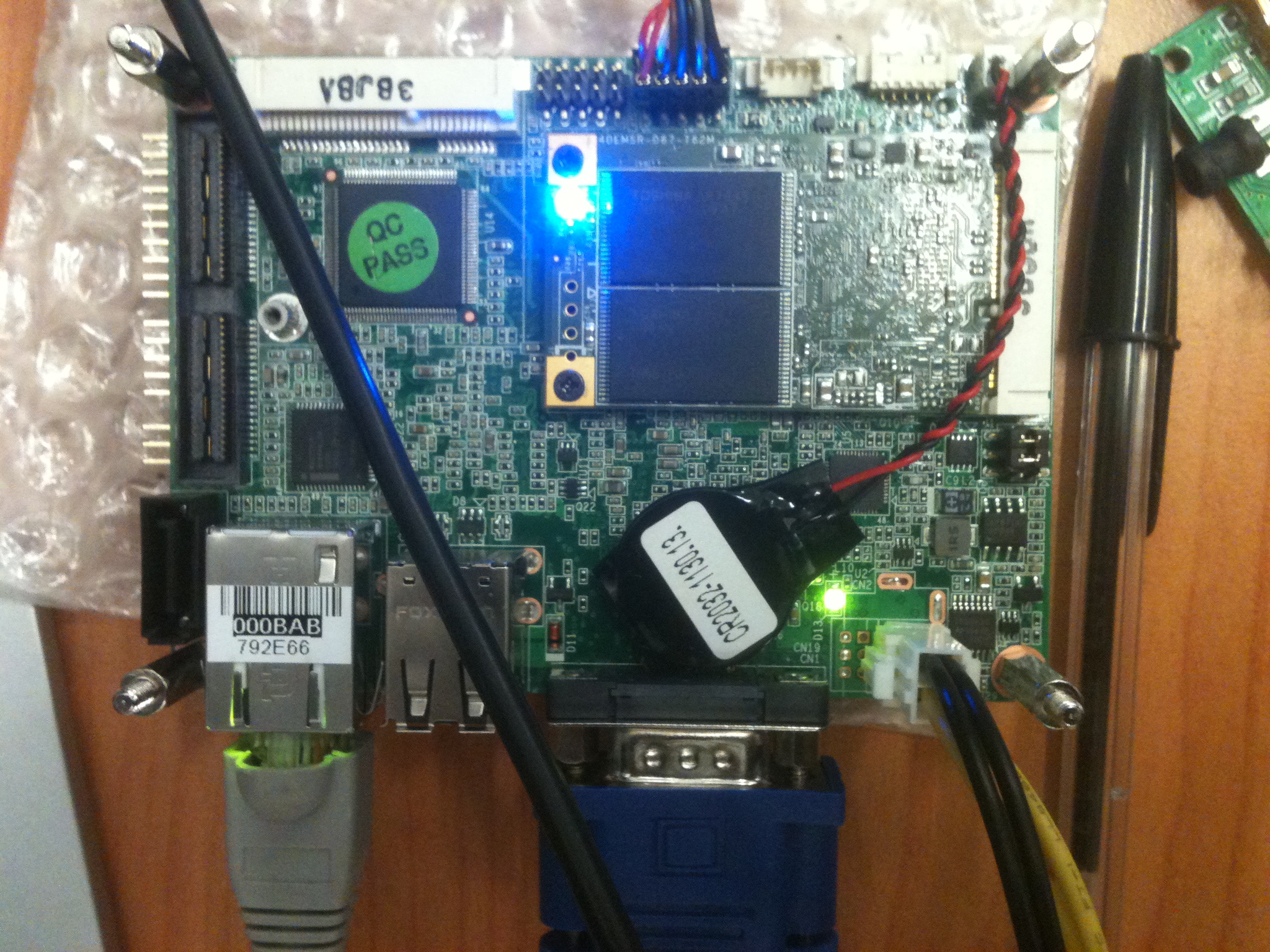
Pour me changer les idées je suis allé dire bonjour à mes anciens collègues du pro et ils ont développé une application ave une carte toute petite pouvant recevoir (sous Windows ou Linux) tout ce que l’on trouve comme logiciel standard. Ils y ont même installé l’outil de développement complet Visual Studio pour travailler en live sur la carte comme pour un PC normal, sauf, que celle-ci possèdes tous les interfaces possibles (du gpio, rs232, usb, spi, i2c, svga, rj45….). Peut être l’avenir pour pallier au problème de compatibilité des cartes microcontrôleur… Sur ce type de cartes, on peut comme sur un PC basique travailler sur le langage que l’on veut (C, C++, Fortran, Basic, Python, MatLab,Java, Html).
 Tiens dans la foulée je me faits une simulation sur un réseau d’antennes à fentes pour le 10.368 GHz. Bon ok les lobes secondaires sont encore trop haut, j’ai pas dus bien optimiser le couplage de la ligne d’alimentation…. Bon en // il faut que je me fasses un bout de plan pour de l’usinage. Elle ne fait que 30 cm * 30 cm.
Tiens dans la foulée je me faits une simulation sur un réseau d’antennes à fentes pour le 10.368 GHz. Bon ok les lobes secondaires sont encore trop haut, j’ai pas dus bien optimiser le couplage de la ligne d’alimentation…. Bon en // il faut que je me fasses un bout de plan pour de l’usinage. Elle ne fait que 30 cm * 30 cm.
Bon j’ai avancé sur Arduino, j’ai monté sur celui-ci une carte avec quelques composants pour interfacer deux ampli moteur brushless afin, de piloter un positionneur EL/AZ pour les futures antennes light à fente de petites dimensions. Il me reste à y installer les codeurs optiques. Mais déjà avec Matlab j’ai la vitesse variable et le sens sur chaque axe. Vivement la carte interface des codeurs.
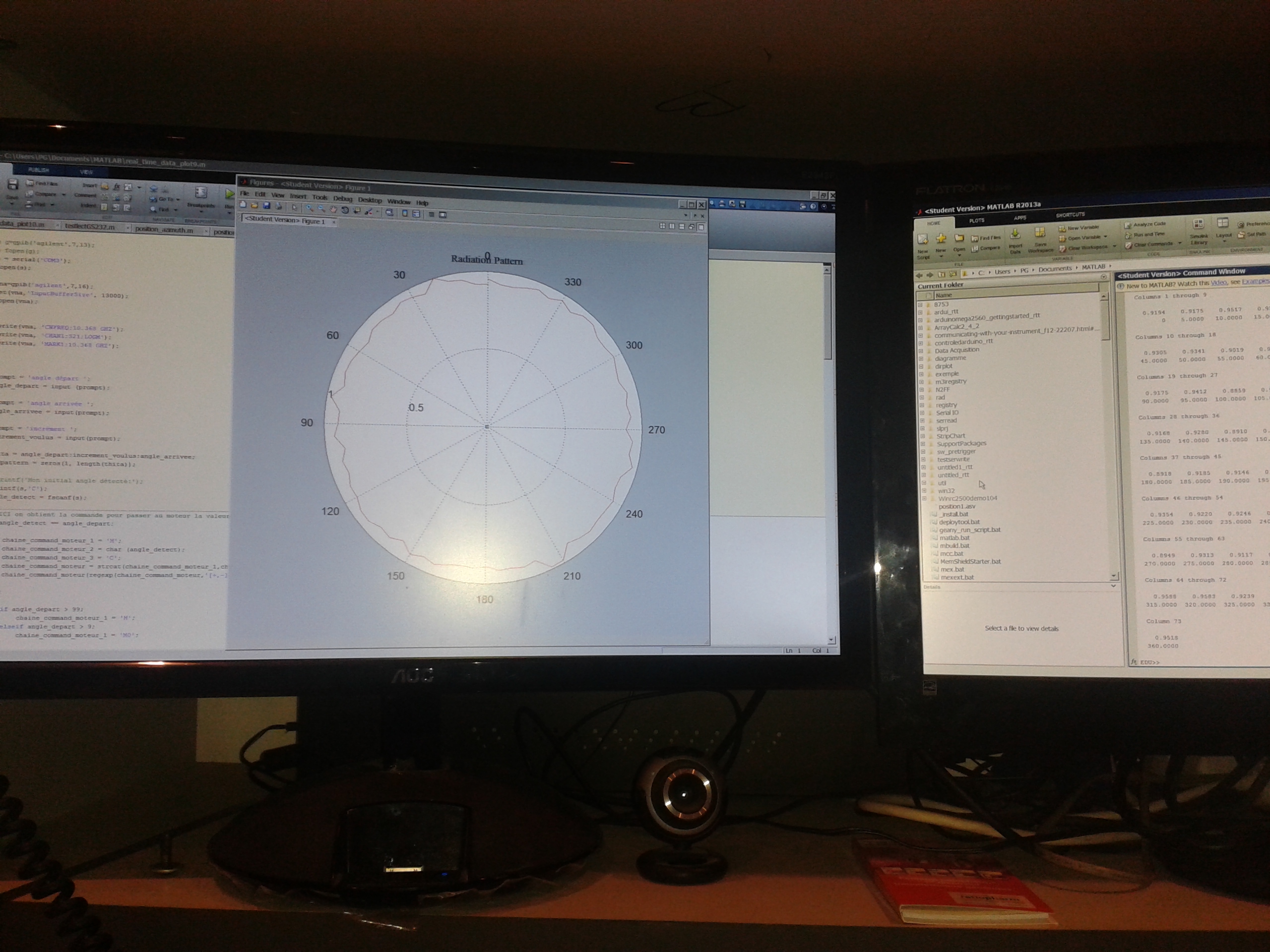
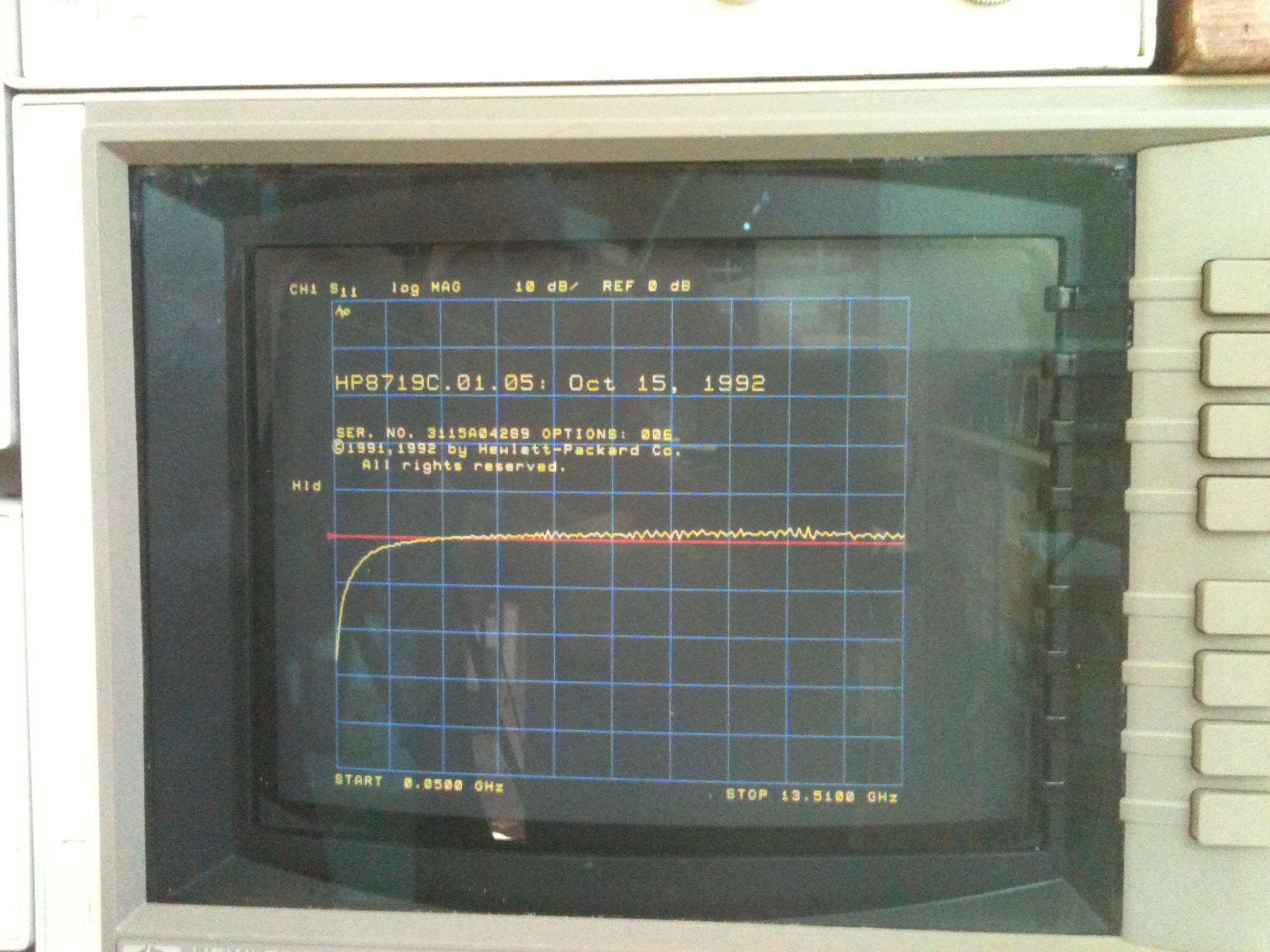
De même, avec MatLab, je pilote le rotor EL/AZ du pylône . Comme c’est un rotor de site Yaesu monté sur un gros Yaesu pour AZ, il y a pas de variation de vitesse mais bon c’est pas fait pour faire des mesures au 1/1000. J’ai réalisé le soft qui fait la mise en position de chaque axe à la position désirée et qui permet de faire de la mesure et acquisition du diagramme de rayonnement avec le VNA HP8719C (pour le moment, je ne trace que la valeur de l’amplitude mais je vais rajouter le tracé de la phase car c’est le seul moyen de savoir si on tourne autour du centre de phase de l’antenne). Je peux faire dans le plan site et dans le plan azimut. Il me reste à faire le scénario pour la découpe AZ en fonction de EL, et un peut de traitement (gain,ouverture, lobes sec…).Pour piloter le rotor AZ et EL j’utilise l’interface au ptotocole GS232 qui est installé dans le tiroir du schack.
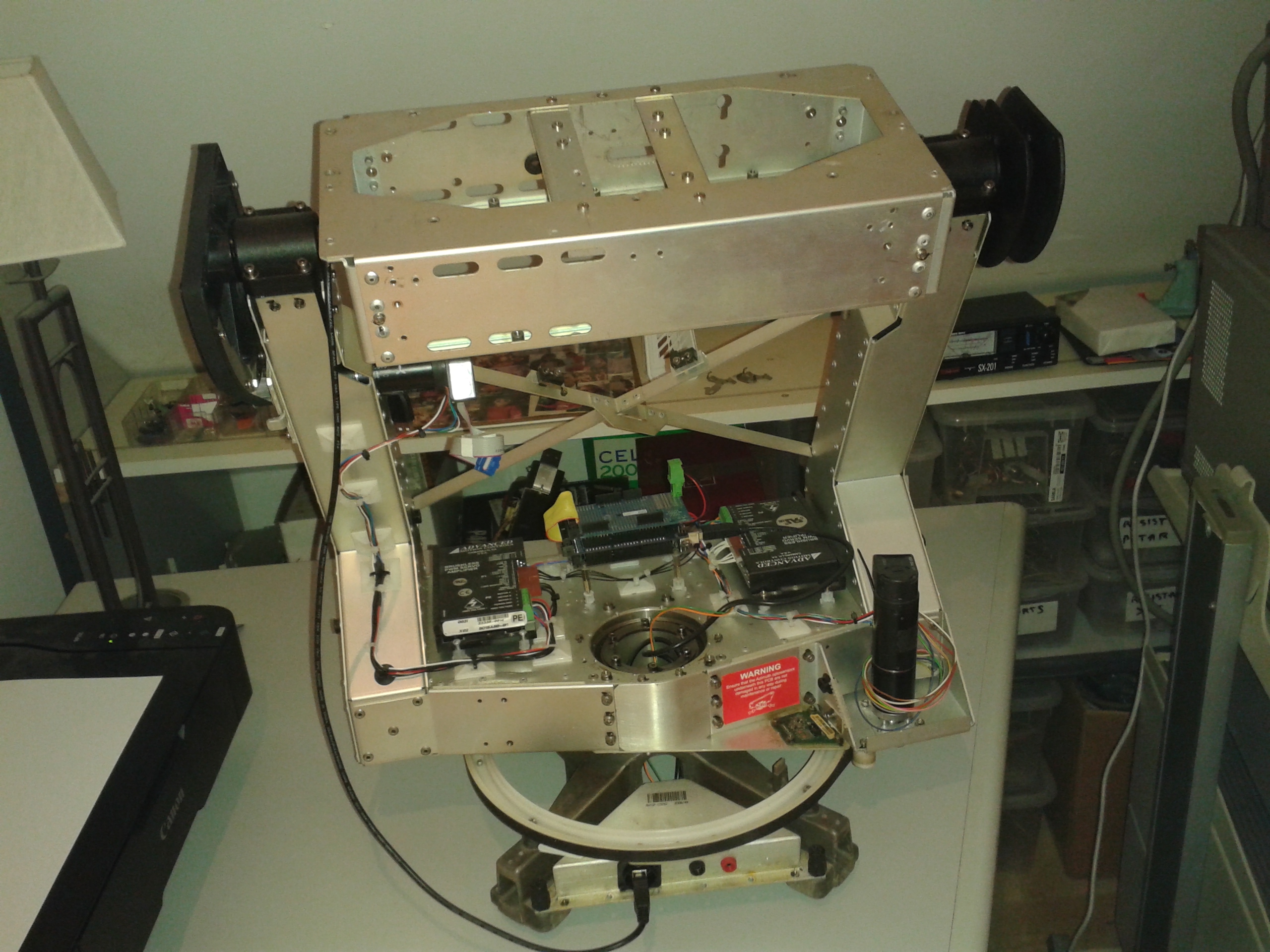
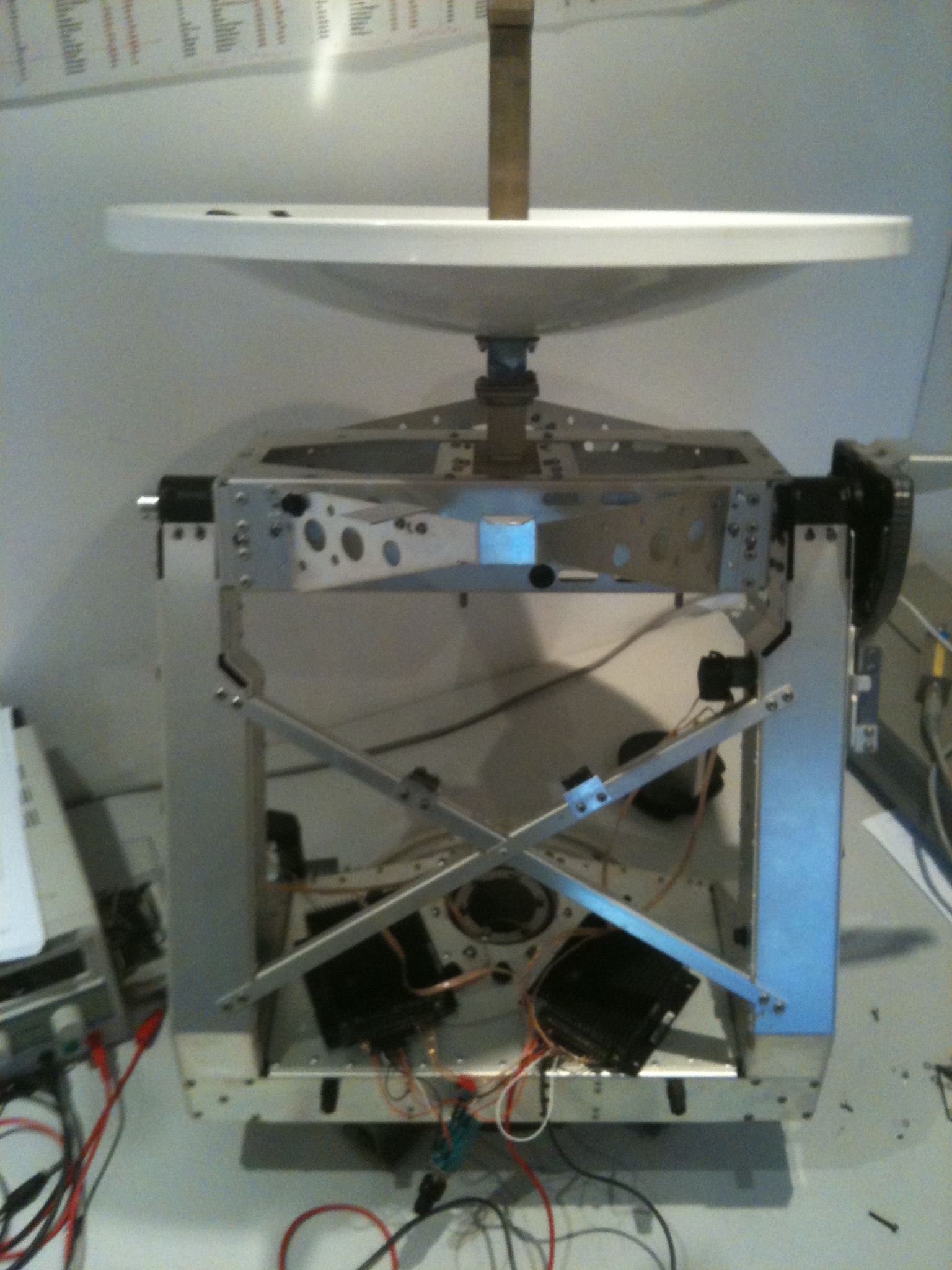
J’ai déjà les amplis moteur pour le « gros » positionneur AZ/EL Scientific Atlanta. Je vais remplacer les synchros par des codeurs absolus. Je vais utiliser plusieurs cartes F1HEN, une me servira pour le positioneur sur le pylonne EL/AZ, l’autre pour le gros AZ/EL Scientific Atlanta et une troisième pour mon positionneur ELAZ SAT. En attendant il faut que je remontes le positionneur SA. J’ai déjà la partie EL qui est démontée, j’attends la partie AZ, ça promet, des moteurs courant continu à excitation séparée (110V DC)… La bonne vieille époque hi…
Dans la foulée il faut que je câbles deux convertisseur AD à sortie // pour rentrer sur lacarte de F1HEN qui lira les informations de position des poteEL/AZ des potentiomètres des rotors Yaesu du pylône.
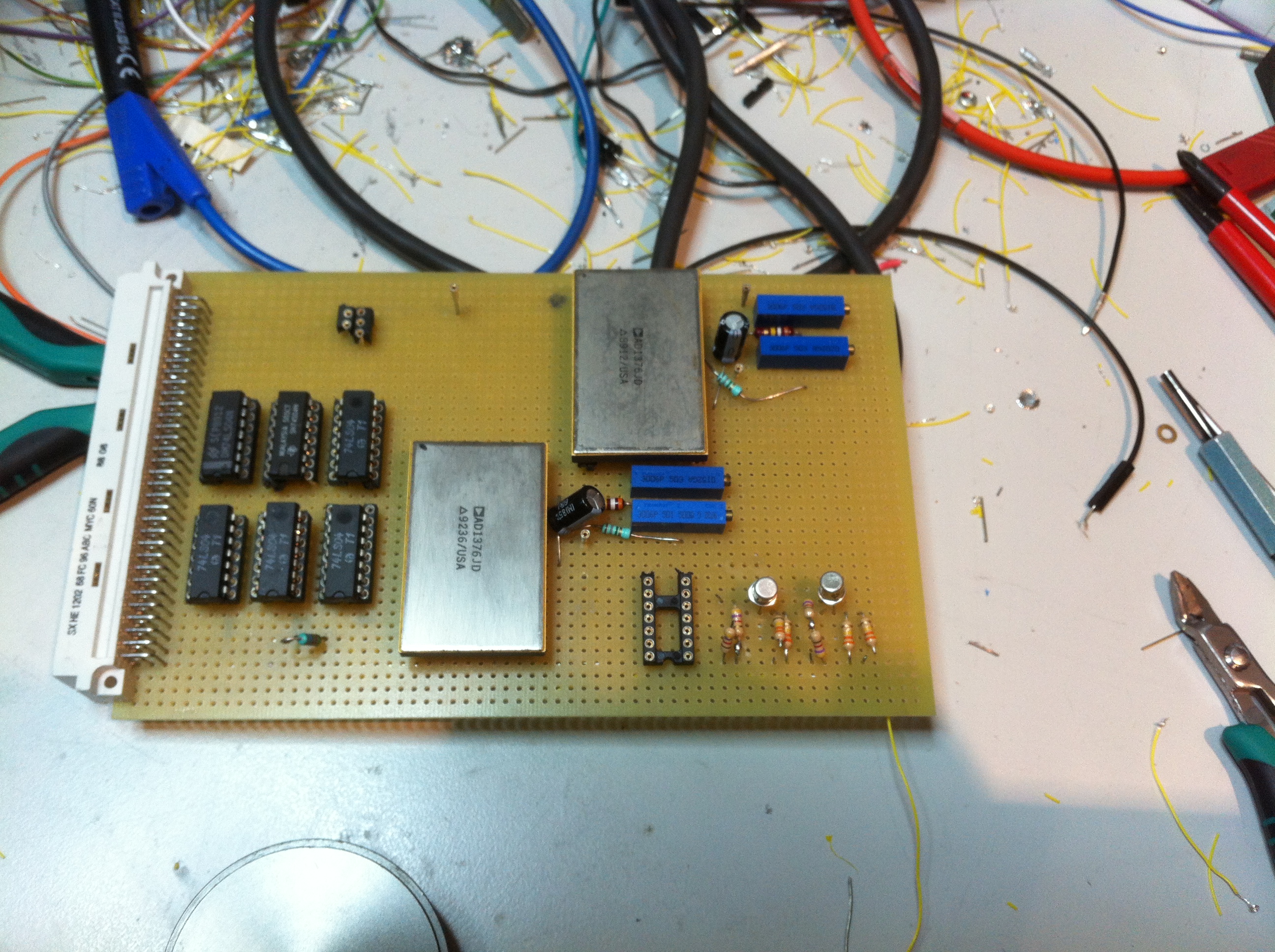

J’ai terminé la carte de conversion AD avec deux convertisseurs 16 bits ultra rapide (mieux que 1 conversion complète sur 16 bits parallèle toute les 1 µsec…). Cette carte sera en liaison avec les potentiomètres de recopie de position du positionneur du pylône qui est YAESU EL monté sur un gros YAESU AZ dont j’ai remplacé les potentiomètres de daube par des Bourns hitech.
J’en ai profité pour faire une carte qui me lit ce que reçoit la carte de F1HEN…. Les deux rangées de 16 LED permettent de lire la position binaire absolu arrivant sur la carte F1HEN.
Toutes ce s cartes sont aux format Europe comme celle de F1EHN et montées dans un mini rack en attendant le gros rack avec la partie puissance.