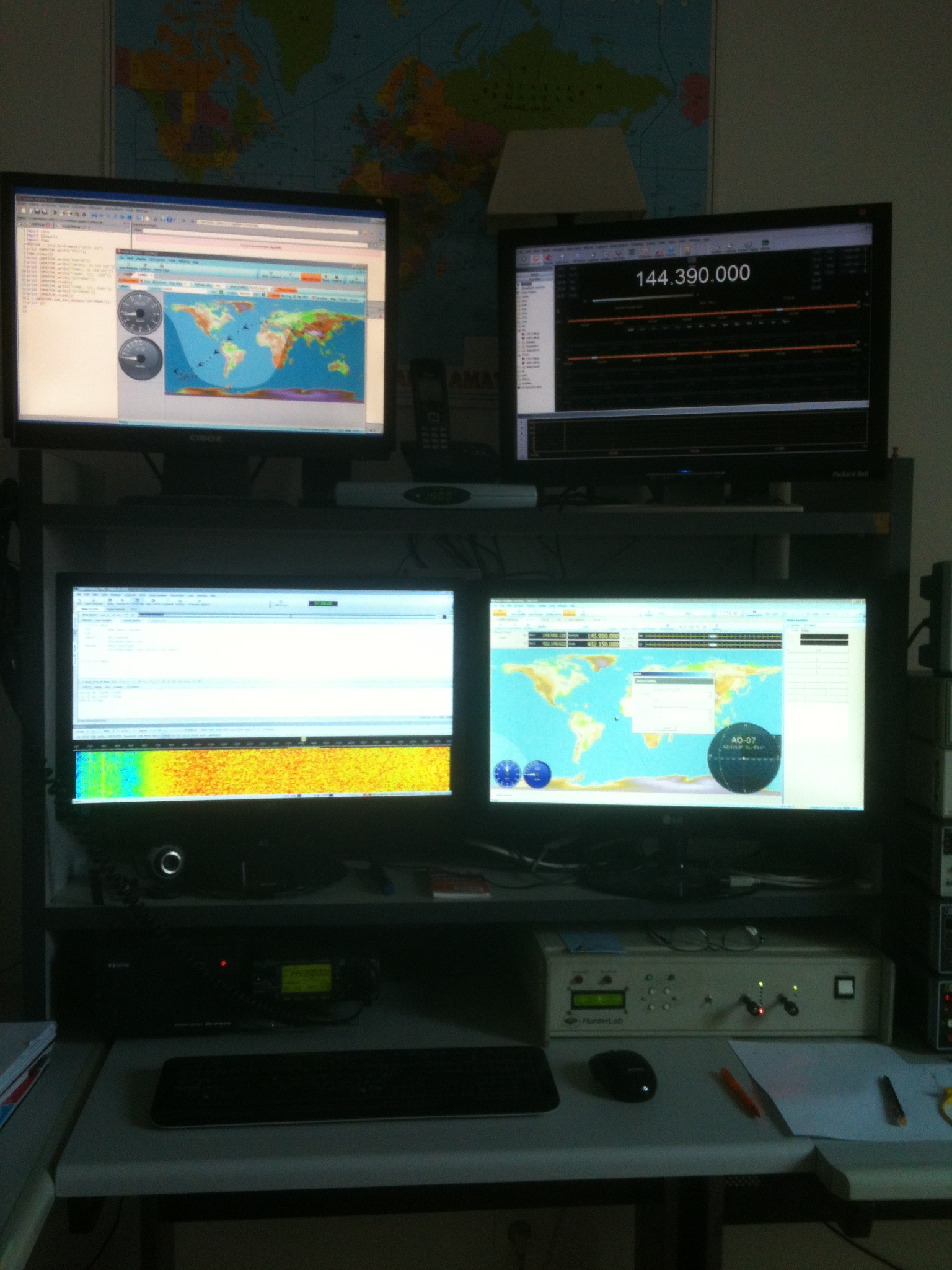
J’utilise un transceiver ICOM IC-706 MKIIG presque toutes bandes et tout modes. Entièrement piloté par le PC. Pour des soucis de compatibilité avec des anciens logiciels, je suis resté en win7 32 bits (gestion du port parallèle pour commuter les antennes assurée).
J’utilise principalement un logiciel (HRD) avec 4 écrans de visualisation pour les différents modes de travail ainsi que les différents paramètres de la station. Je ne ferai pas la liste des autres logicels (WJT, SDR…).
J’utilise aussi des logiciels comme HFSS (très compliqué), Matlab (ça c’est un logiciel…), HPVEE très pratique pour tester rapidement un interface..
Je passes beaucoup de temps à regarder plusieurs langages en même temps C pour Arduino Python pour comprendre la programmation et Matlab qui je crois va me servir pour tout.
HRD me permet ainsi en fonction des bandes de gérer via le port parallèle des relais RF aussi bien près du transceiver que en haut du pylône (relais plus LNA derrière les antennes 144 et 432).
Je minimise le nombre des coax venant du pylône à la station (je n’en ai que deux en fait, un pour les bandes hautes et l’autre pour les bandes basses).

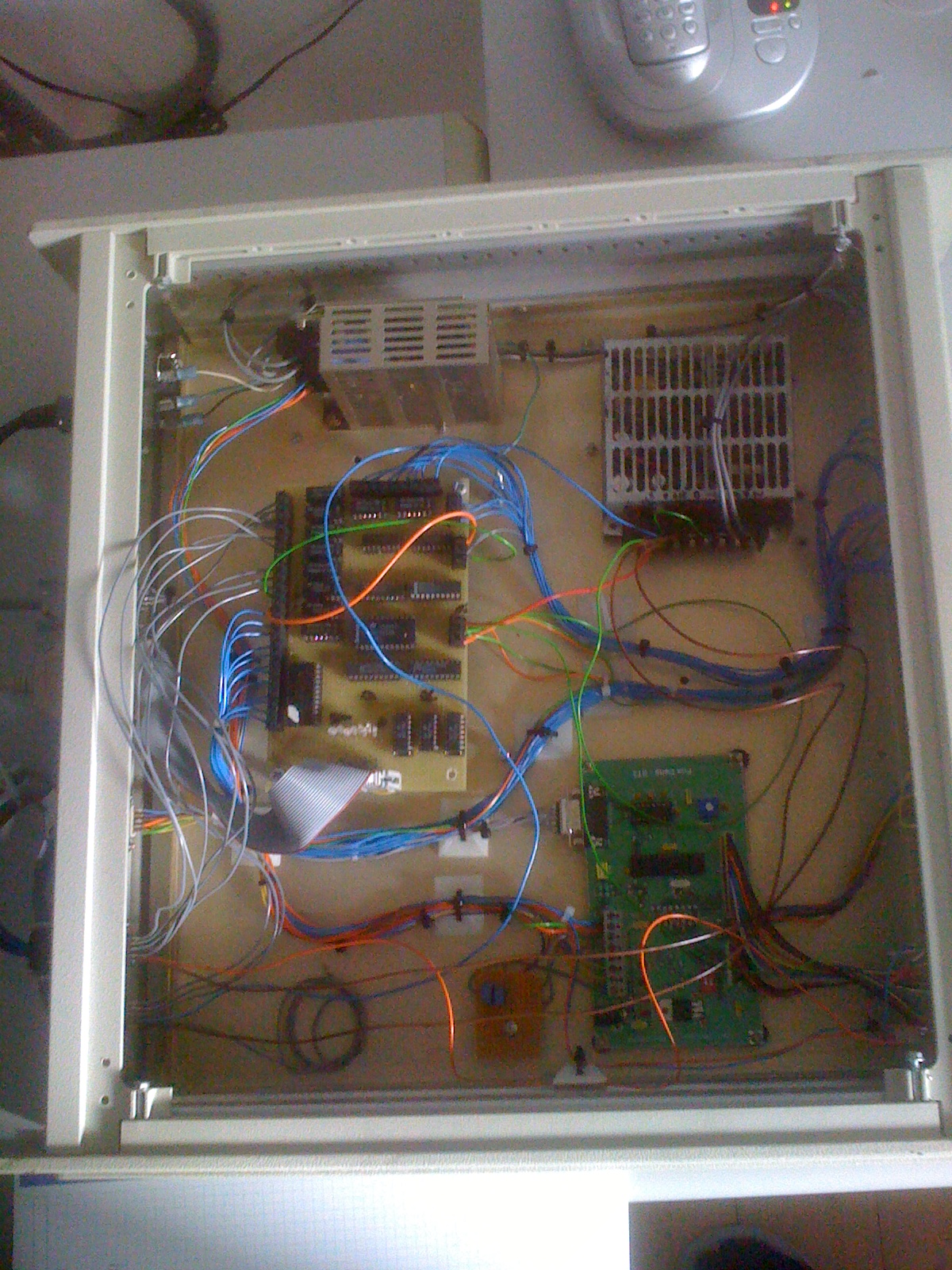
Un tiroir commande (fabrication perso) piloté par le port parallèle du PC drive les commandes de relais pour les antennes situées sur le pylône, les relais recevant les informations des différentes antennes sur les connecteurs RF du transceiver.
J’utilise en fait les 4 premiers bit pour les relais dans le schack et les 4 suivants pour les relais au pylône.
Une logique permet à deux rotacteurs de travailler en mode automatique (une led rouge me prévient), là c’est le pc qui envoie en fonctions des fréquences le (les) relais à actionner et des leds vertes me disent lesquelles. Je peux bien sur passer en mode manuel et c’est moi qui pilote les relais antennes. (perso je préfère le mode automatique ça m’évite de faire comme une fois en modes sat de passer en émission en 432 sur l’antenne et son LNA 144 car j’étais resté en mode manuel. Heureusement Yannick de l’Electrolab a pu me le réparer car je suis pas encore équipé pour du CMS.
Ce tiroir permet aussi de gérer les deux rotors AZ/EL du pylône. J’utilise un interface au protocole GS232 qui a un affichage de la position AZ et EL, des boutons CW/ CCW, UP/DOWN en face avant. Les rotors sont ainsi pilotés soit par le PC (en RS232C) , soit par la commande et recopie en face avant du tiroir de commande, soit au pied du pylône.
 Petite place à coté de la station pour la soudure, la loupe éclairante et une alimentation.
Petite place à coté de la station pour la soudure, la loupe éclairante et une alimentation.
Là il y a la box/817 pour la future station portable (avec un PC portable, vérifié avec le sdr et pilotage du 817 dans la box/817 pour la future box 10 GHz portable).