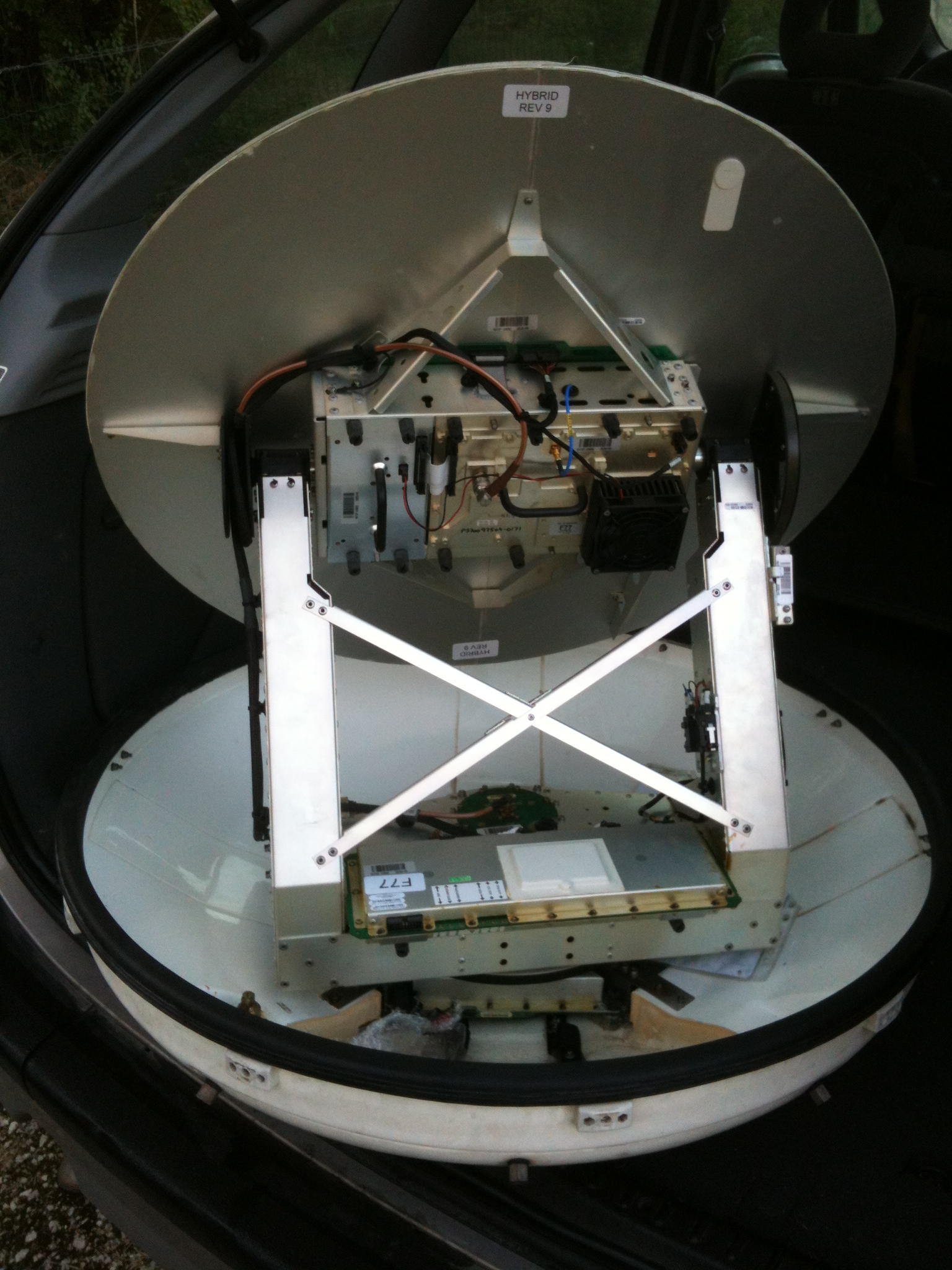
La première chose est de virer l’électronique et l’antenne (inutilisable à nos fréquences OM). Dommage car c’était une belle antenne patch en polar circulaire.

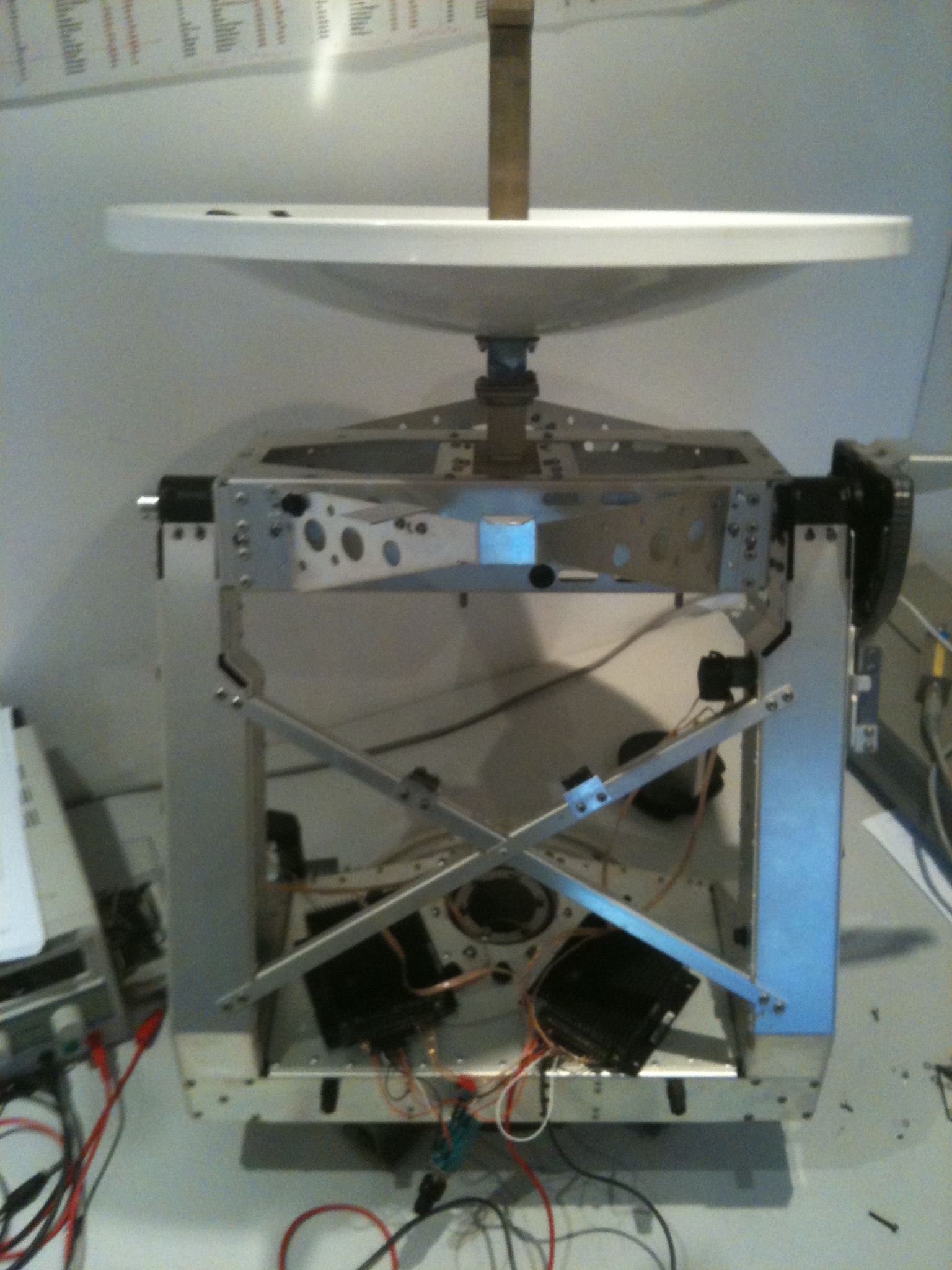
Vus le couple de l’antenne à mettre (à cause du déport en site de celle-ci) je vais être obligé de virer les petits moteurs pas à pas par des moteur DC Maxon, je testes avec des servos amplificateurs.Là je suis déçus car ces moteurs avec réducteurs n’ont toujours pas assez de couple. donc je les remplaces par des moteurs avec reducteurs ayant plus de couple.
 Je mets deux amplificateurs qui vont bien en commande PWM, sens et blocage (juste trois fils).
Je mets deux amplificateurs qui vont bien en commande PWM, sens et blocage (juste trois fils).
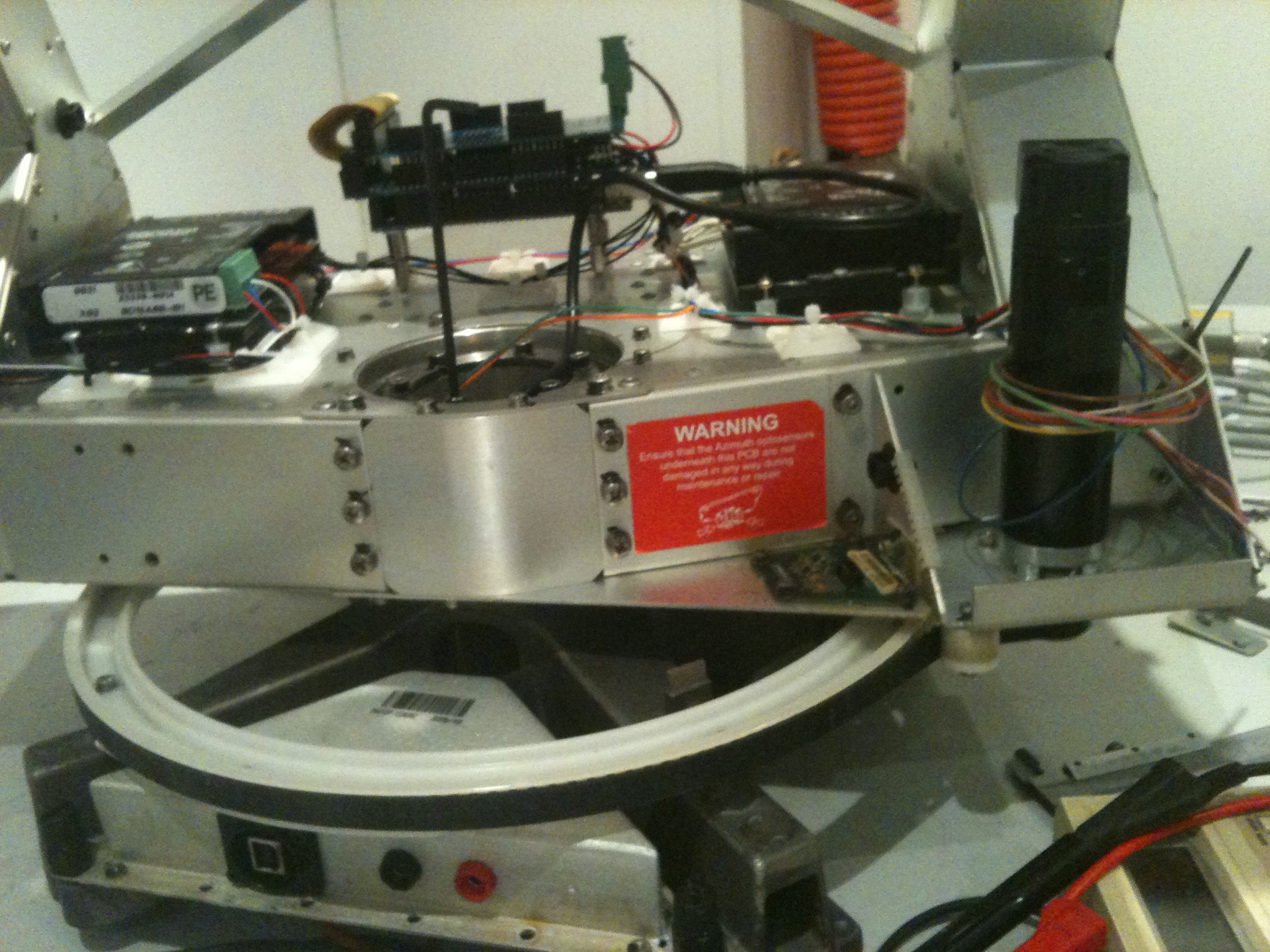
Ces moteurs brushless reliés aux servos ont des codeurs pour faire un asservissement mais vus la régulation de vitesse apportés par les blocs, ils sont pour l’instant non utilisés. Connecteur USB (RS232) pour l’Arduino et alimentation 24V sous l’axe AZ.

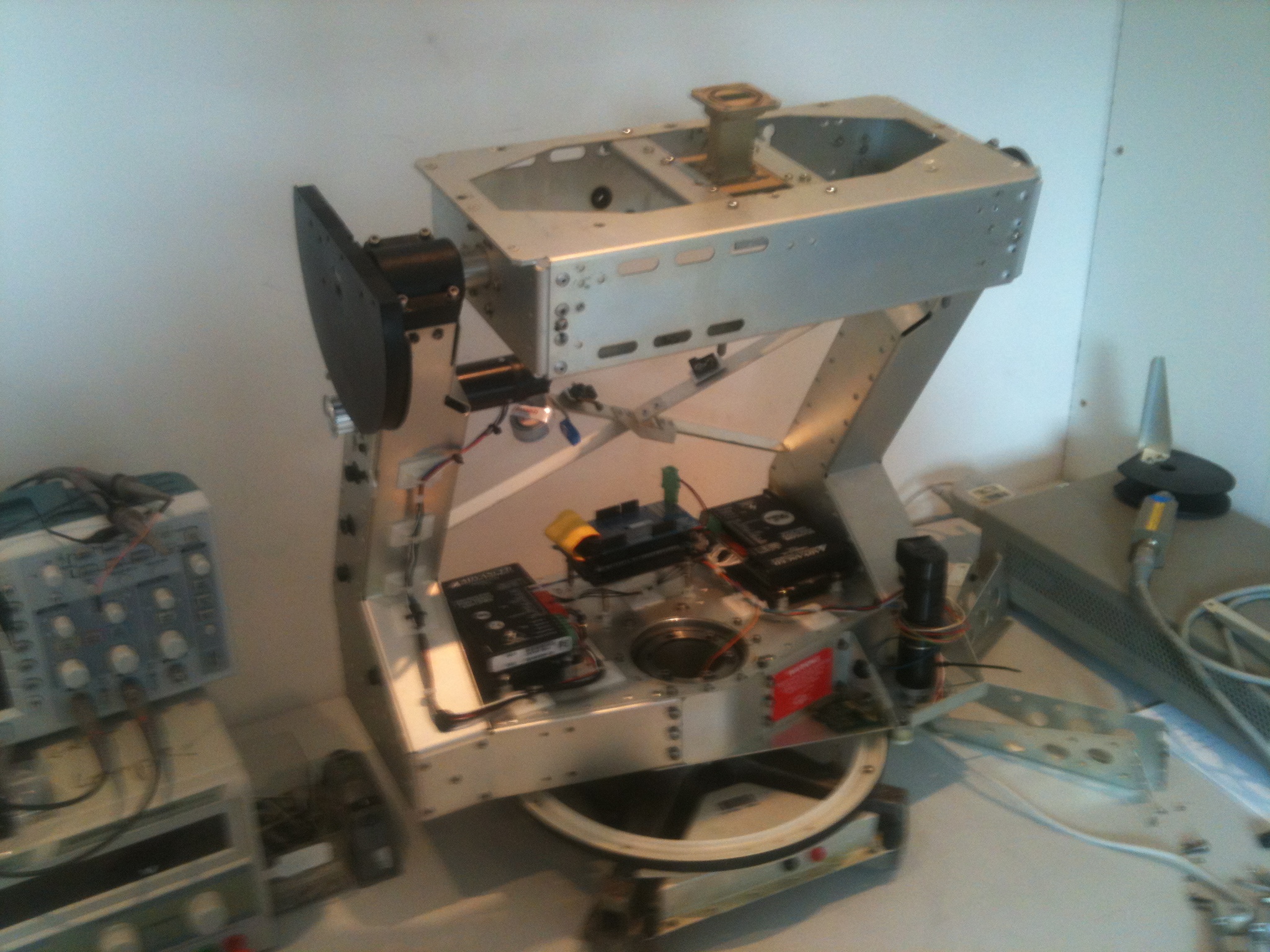
Les deux variateurs brushless sont reliés via une carte bidouilles (des simples transistor NPN) à une carte Arduino Mega. Avoir ne nombreuses entrées sorties TTL peut être utile suivant le type de codeurs à utiliser. La bride WR90 pour le petite parabole ou l’antenne à fente est installée. Le coaxial de descente passera par le trou central de l’axe AZ bas. Bon faut travailler sur quel type d’interface codeur je vais utilisé. Du codeur j’ai de l’incrémental et de l’absolus.
Matlab pour le moment me pilote le programme de l’arduino qui lui gère les deux amplificateurs Brushless.